Repülésvezérlési konfiguráció:
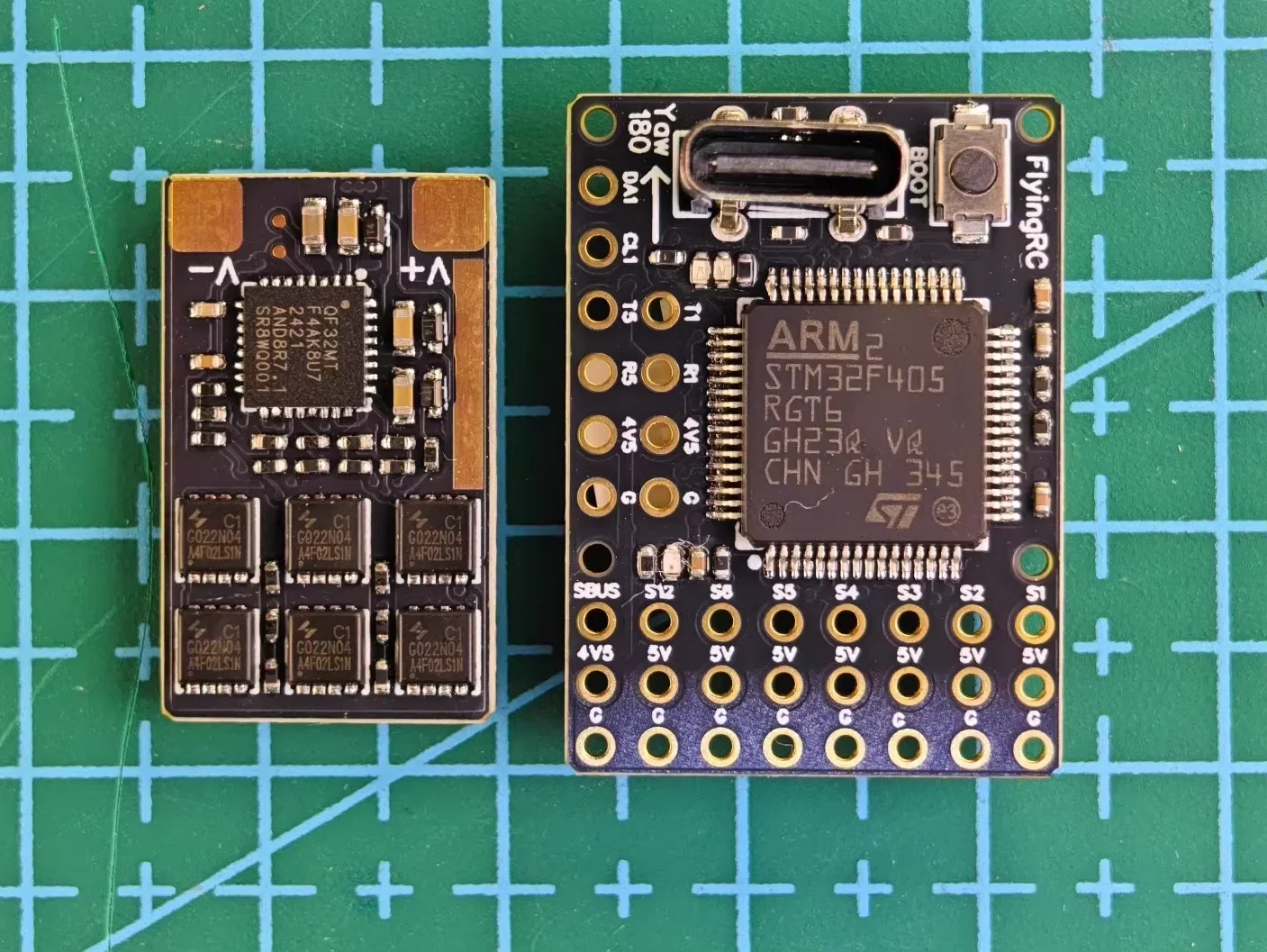
STM32F405RGT6 fő vezérlő, M4 mag, 168MHz fő frekvencia, 1MB Flash; Más versenytársak zárt forráskódú mini repülésvezérlőihez képest (STM32F0 sorozat) a teljesítmény több mint ötszöröse.
ICM42605 giroszkóp, harmadik generációs TDK érzékelő, drónalkalmazásokra optimalizálva.
SPL06 barométer, egy belföldön gyártott nagy pontosságú barométer.
Beépített kettős LDO, érzékelőtől független tápegység, stabilabb repülés.
Repülésirányítás bemutatása:
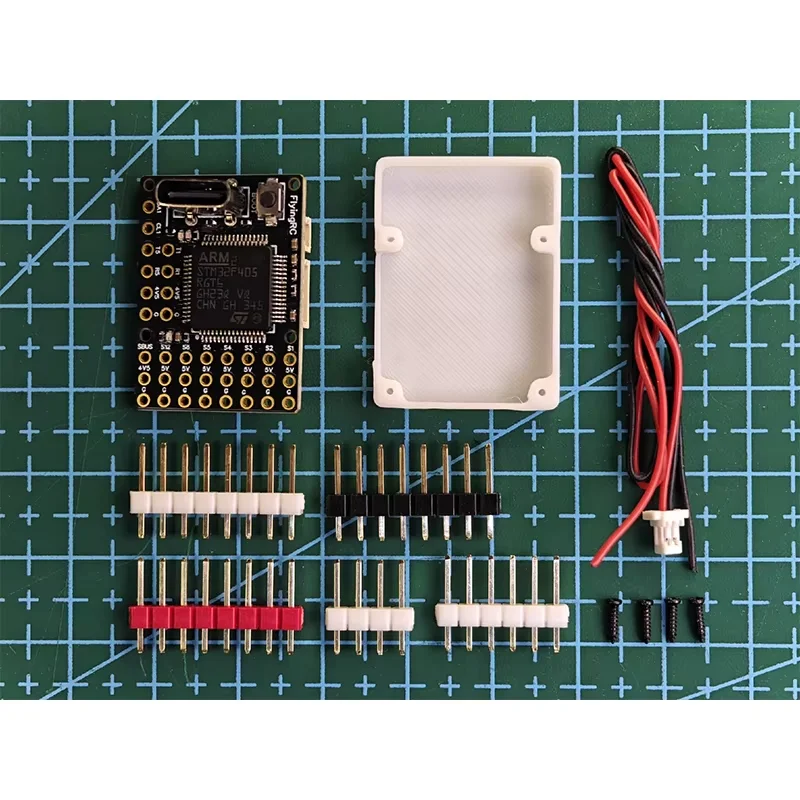
Super Mini térfogat: 27,9 * 20,3 * 11,2 mm, súlya mindössze 2,8 gramm (a tű nélkül, a tű hegesztése után körülbelül 5,3 gramm).
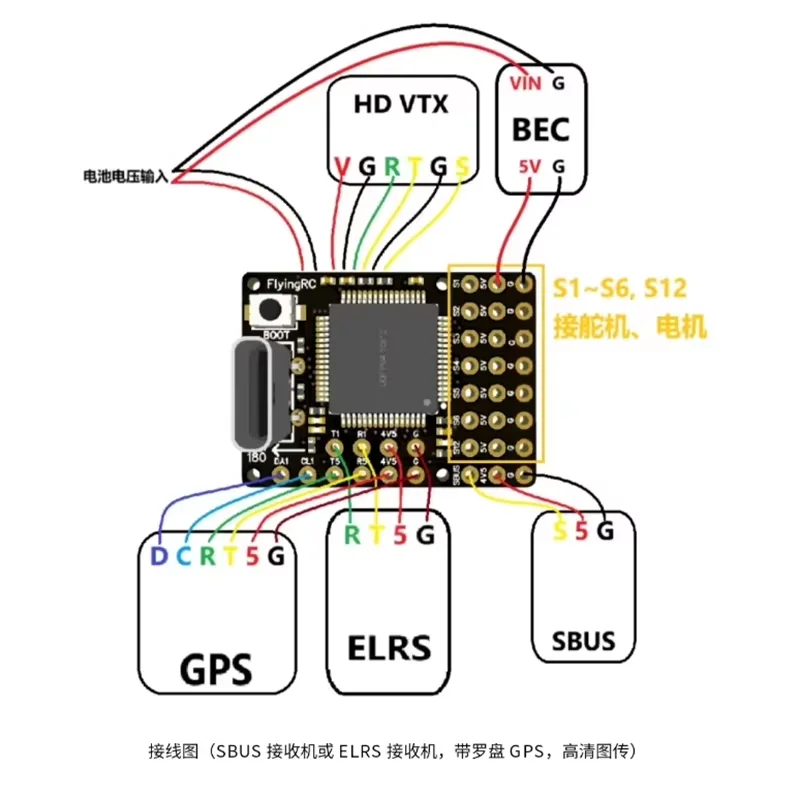
7 PWM kimenet, 3,5 soros port (az SBUS csak a soros portok felét számolja).
A TypeC interfész közvetlenül a repülésvezérlőbe csatlakozik, stabil kapcsolatot és hosszabb élettartamot biztosítva. Kettős C-kábellel mobiltelefonhoz csatlakoztatható, és a mobil földi állomáson keresztül hangolható (az AP firmware-jéhez a QGroundControl alkalmazás használata ajánlott).
Nincs analóg ampermérő funkció (külső I2C protokollú ampermérőhöz csatlakoztatható), támogatja az akkumulátorfeszültség kimenetet (SH1.0 2P interfész), és az akkumulátorfeszültség a nagyfelbontású képátviteli közvetlen behelyezési portot is táplálja, akár 6 másodperces bemenetet támogatva.
Támogatja a nagyfelbontású közvetlen beszúrást (SH1.0 6P interfész), a nagyfelbontású OSD-t (DJI HD, Snail HD, OpenIPC stb.), de nem támogatja az analóg OSD-t.
Közvetlenül behelyezhető az ELRS vevőbe, ami jelentősen csökkenti a méretet.
Támogatja a nyílt forráskódú firmware-eket, mint például az AP, BF, INAV stb. A merevszárnyúak az AP firmware használatát javasolják.
Tömeggyártású NYÁK-folyamat: fekete forrasztómaszk, aranyozás, gyantadugóval ellátott furat, 4 rétegű NYÁK
Tömeggyártási SMT folyamat: Jialichuang SMT