Configuration du contrôleur de vol :
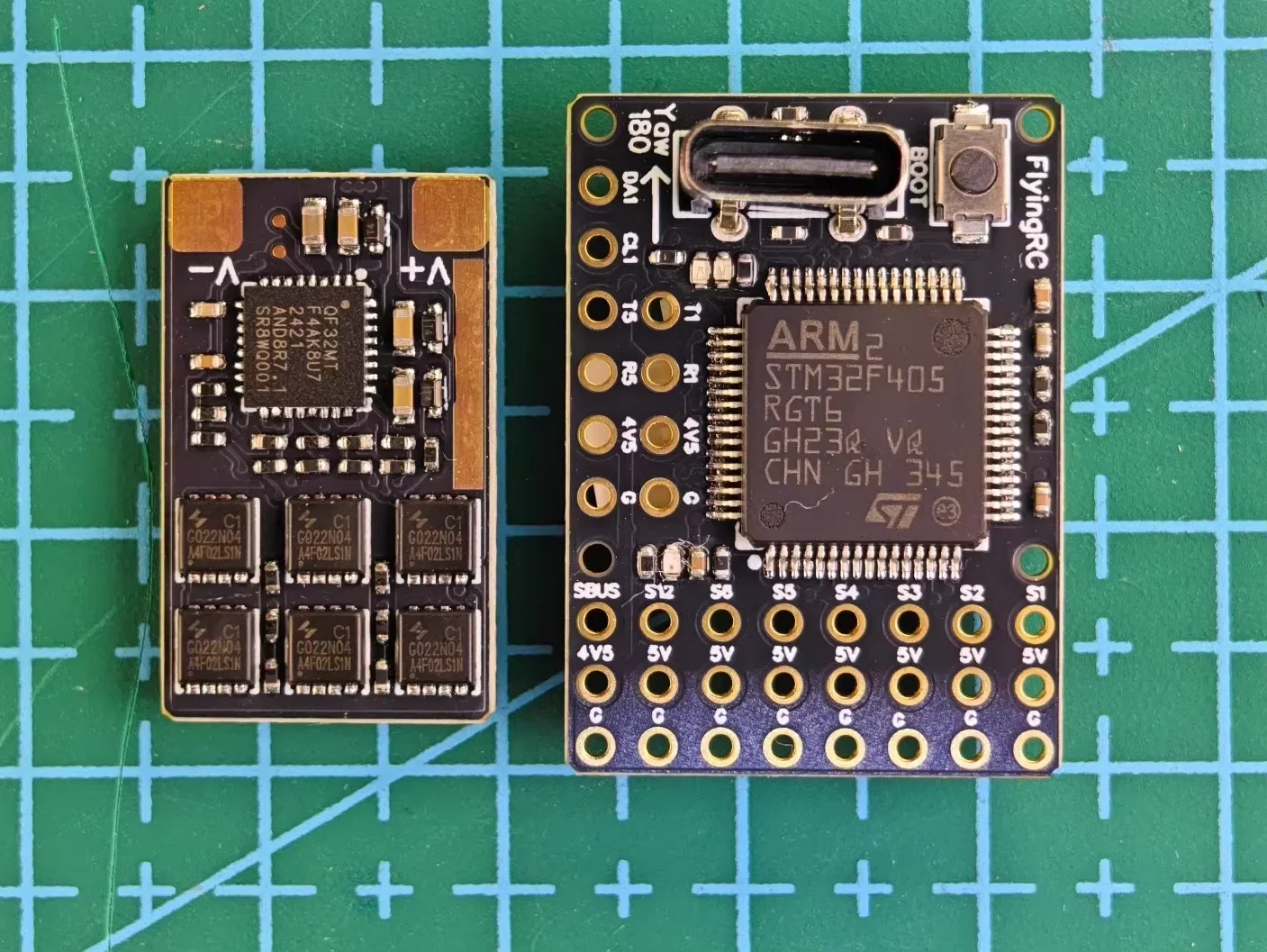
Contrôle principal STM32F405RGT6, cœur M4, fréquence principale 168 MHz, 1 Mo Flash ; Par rapport aux mini-contrôleurs de vol à code fermé d'autres concurrents (utilisant la série STM32F0), les performances sont plus de 5 fois supérieures.
Gyroscope ICM42605, capteur TDK de troisième génération, optimisé pour les applications de drones.
Baromètre SPL06, un baromètre de haute précision de fabrication nationale.
Double LDO intégré, alimentation indépendante du capteur, vol plus stable.
Présentation du contrôleur de vol :
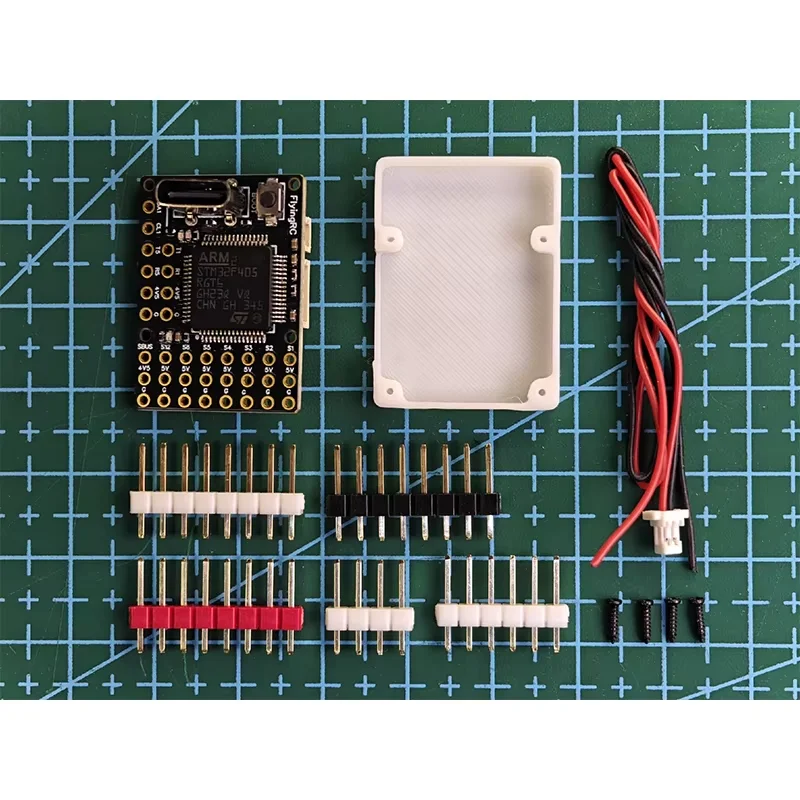
Volume super mini : 27,9 * 20,3 * 11,2 mm, ne pesant que 2,8 grammes (sans la broche, environ 5,3 grammes après soudure de la broche).
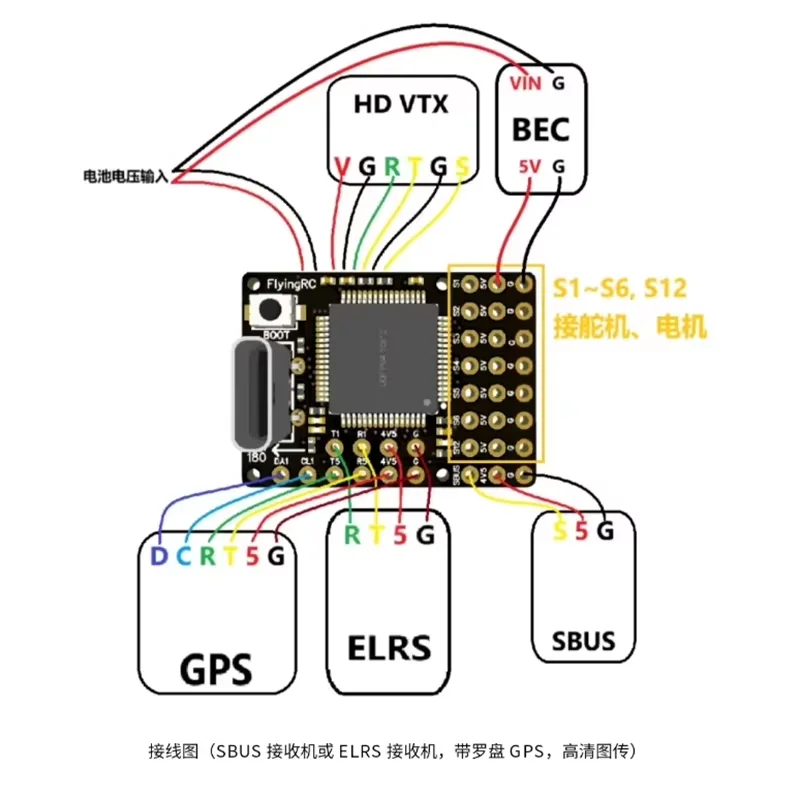
7 sorties PWM, 3,5 ports série (SBUS ne compte que la moitié des ports série).
L'interface TypeC est directement insérée dans le contrôleur de vol, avec une connexion stable et une durée de vie plus longue. Elle peut être connectée à un téléphone portable via des câbles doubles C et réglée via la station au sol version mobile (il est recommandé d'utiliser l'application QGroundControl pour le firmware AP).
Pas de fonction d'ampèremètre analogique (peut être connecté à un ampèremètre externe protocole I2C), prend en charge la sortie de tension de la batterie (interface SH1.0 2P), et la tension de la batterie alimente également le port d'insertion directe de la transmission d'images haute définition, prenant en charge jusqu'à 6s d'entrée.
Prend en charge l'insertion directe haute définition (interface SH1.0 6P), OSD haute définition (DJI HD, Snail HD, OpenIPC, etc.), mais ne prend pas en charge l'OSD analogique.
Peut être directement inséré dans le récepteur ELRS, réduisant considérablement la taille.
Prend en charge les firmwares open source tels que AP, BF, INAV, etc. L'aile fixe recommande d'utiliser le firmware AP
Processus de PCB de production de masse : masque de soudure noir, placage or, trou de bouchon en résine, carte à 4 couches
Processus SMT de production de masse : Jialichuang SMT