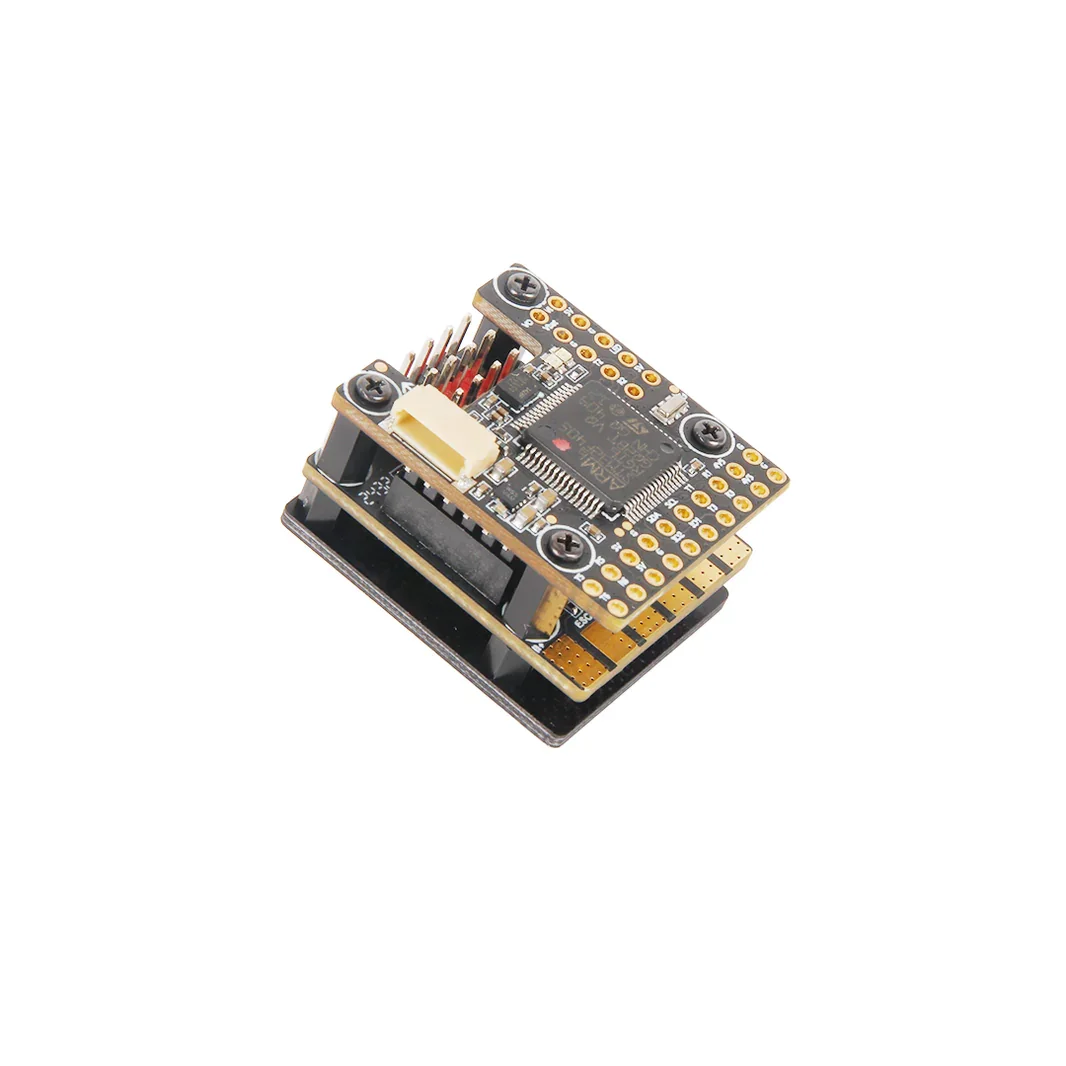
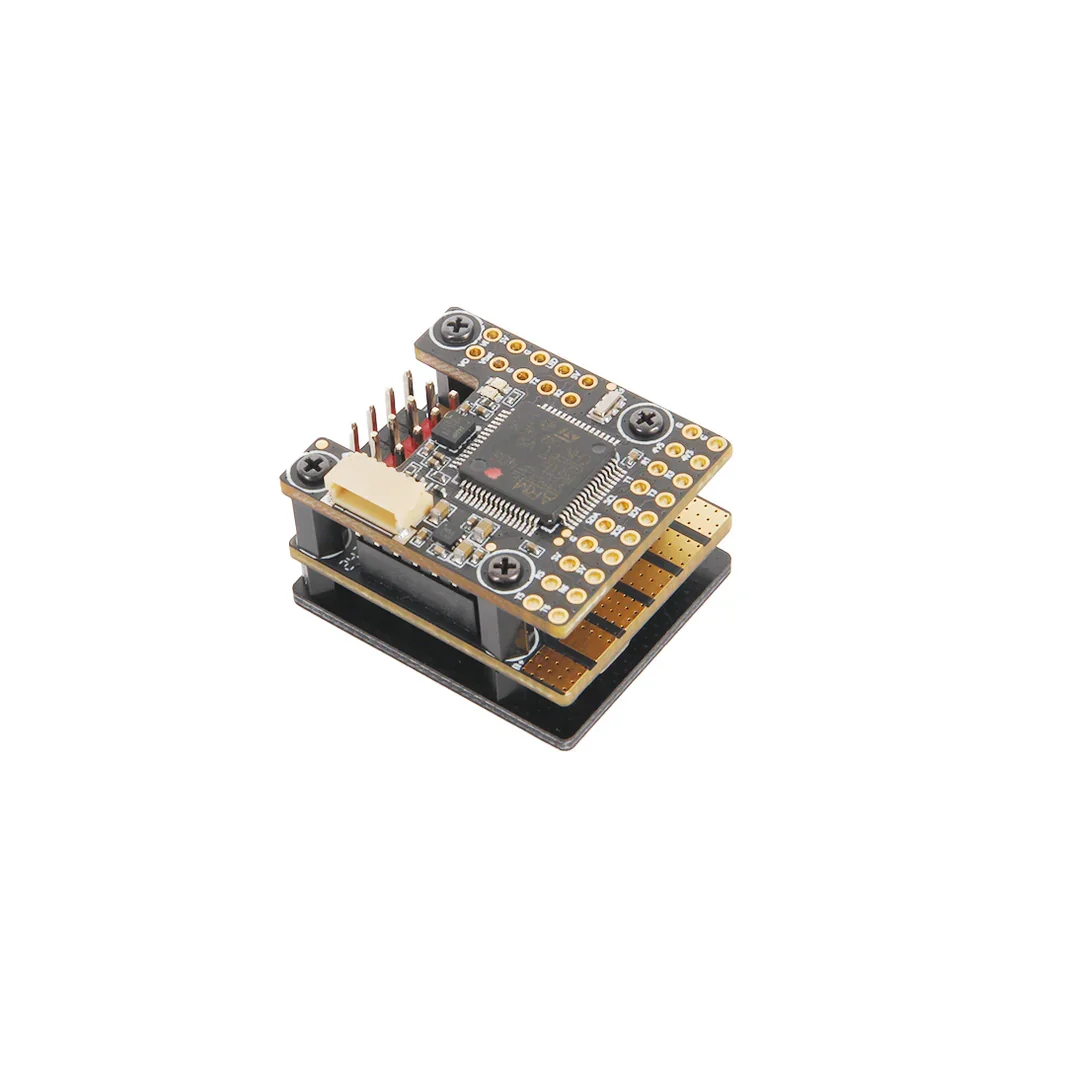
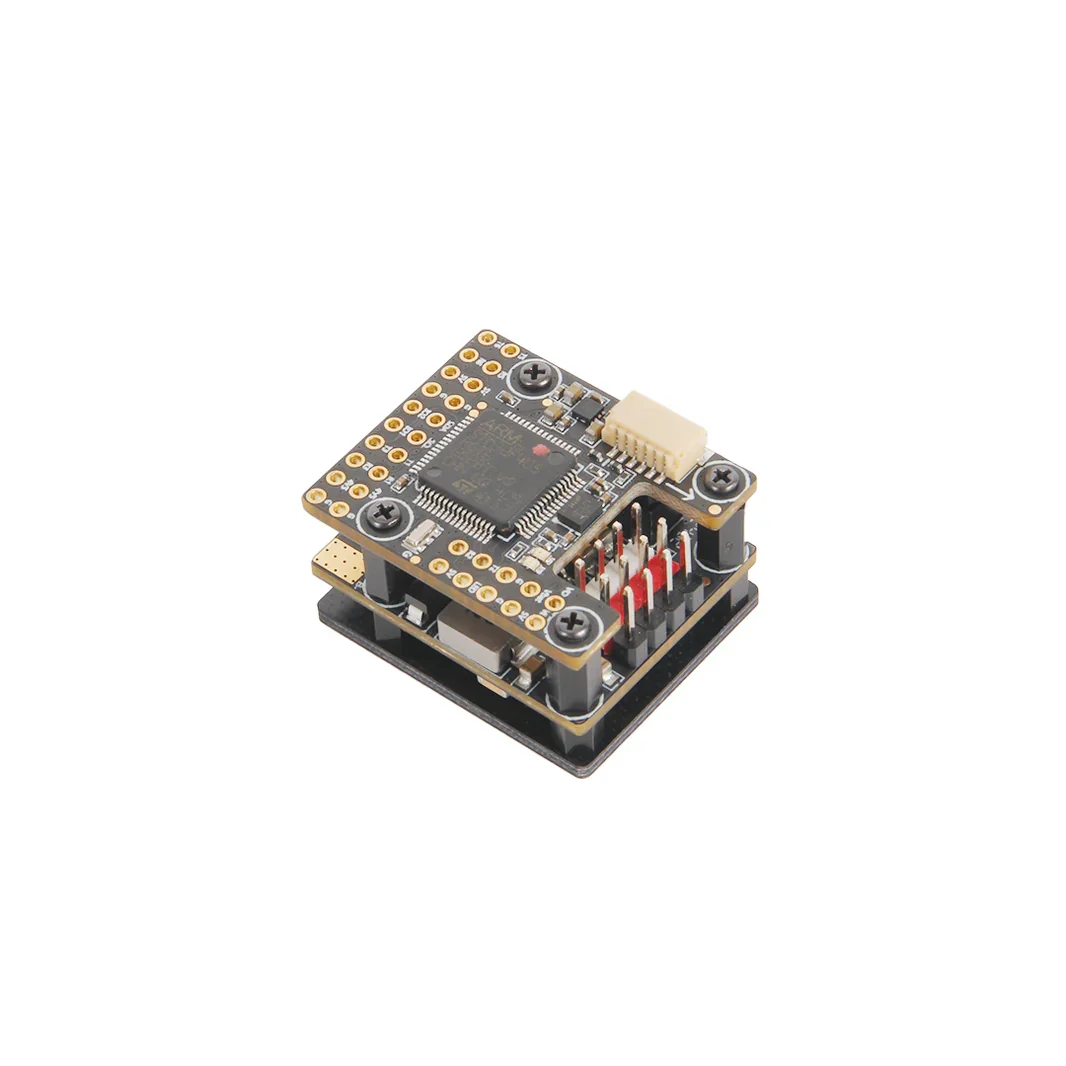
Il Kakute F405 Wing Mini è un controllore di volo compatto progettato per velivoli ad ala fissa e piccoli UAV, dotato del processore STM32F405 e dell'IMU a basso rumore ICM-42688-P con LDO indipendente per una maggiore stabilità. Include due BEC a bordo per l'alimentazione regolata, un barometro integrato, supporto I2C e OSD analogico. Pensato per velivoli di piccole dimensioni, questo controllore di volo offre prestazioni elevate e precisione in un formato compatto, risultando ideale per configurazioni con spazio limitato.
Caratteristiche
-
Microcontrollore STM32F405 funzionante a 168 MHz
-
Unità di misura inerziale (IMU) ICM-42688-P ad alta precisione e basso rumore.
-
2 uscite BEC integrate 5V, 5V/7.2V
-
Sensore di tensione e corrente integrato
-
Barometro integrato SPL06
-
Supporto per porta I2C
-
Il design piccolo e discreto si adatta a montature compatte.
-
Supporta INAV (7.1.2 e versioni successive), Ardupilot (4.5.6 e versioni successive), Betaflight (4.5.2 e versioni successive)
Schemi
-
Microcontrollore: STM32F405RGT6, 168 MHz, 192 KB di RAM, 1 MB di memoria Flash
-
Unità di misura inerziale (IMU): ICM-42688P (SPI1)
-
Alimentato da: SPL06 (I2C2)
-
OSD: AT7456E (SPI2)
-
Blackbox integrato: 128 Mbit (SPI3)
-
5x Uarts (1,2,3,5,6) e R3 è con inversione integrata
-
7 uscite PWM, PWM7 utilizzata di default per i LED NeoPixel.
-
2x ADC (Bat1/Curr1)
-
1x I2C (l'I2C2 è per dispositivi esterni, anche per sensori integrati)
-
2 LED per lo stato della centralina (blu) e l'indicatore di tensione a 3,3 V (verde)
-
Estensore per chiavetta USB/DFU con porta USB Type-C
-
Rilevamento di corrente ad alta precisione (110 A continui, 132 A di picco)
-
Sensore di tensione della batteria: 1K:10K (scala 1100 in INAV, BATT_VOLT_MULT 11 in ArduPilot, scala 110 in Betaflight)
-
Consumo statico 110 mA a 5 V
Firmware FC
-
ArduPilot: Kakute F405 Wing Mini (4.5.2 e versioni successive)
-
INAV: Kakute F405 Wing Mini (7.1.2 e versioni successive)
-
Betaflight: Kakute F405 Wing Mini (4.5.6 e versioni successive)
Quadro elettrico
-
Intervallo di tensione in ingresso: 7,4~36 V (2~8S LiPo)
-
2x pad di alimentazione ESC
-
Rilevamento corrente: 110 A continui, 132 A di picco. (Scala 250 in INAV, 40 A/V in ArduPilot, Scala 250 in Betaflight)
Uscita BEC 5V
-
Progettato per FC, ricevitore, OSD, telecamera, striscia LED 2812, GPS, telemetria, ecc.
-
Uscita 5,3 +/- 0,1 V CC
-
Corrente continua 3 Ampere, picco 4,8 A
Uscita BEC VS
-
Progettato per i servomotori
-
Tensione regolabile, 5,3 V predefinita, opzione 7,2 V con pad Jumper
-
Corrente continua 3 Ampere, picco 4,8 A
Uscita BEC a 3,3 V
-
Regolazione lineare
-
Corrente continua: 150 mA
Meccanico
-
Montaggio: 20 x 20 mm, foro M2
-
Dimensioni: 25 x 30 x 20 mm
-
Peso: 17 g con scheda di estensione USB
Esempio di schema elettrico

Link di riferimento
-
Ardupilot WIKI: https://ardupilot.org/copter/docs/common-kakuteh7wing.html
-
Mappatura Ardupilot: https://docs.holybro.com/autopilot/kakute-h743-wing/ardupilot-mapping
-
Mappatura INAV :https://docs.holybro.com/autopilot/kakute-h743-wing/inav-mapping
La confezione include
-
1x Kakute F405-Wing Mini Flight Controller
-
1 scheda di alimentazione
-
1x Tavola inferiore
-
1x scheda USB-EXT
-
1 modulo GPS (opzionale)
-
1xCondensatore elettrolitico: 2000uF 35v
-
3 set2.54 Pin DuPont
-
1 cavo JST-SH6Pin da 15 cm (per scheda USB-EXT)