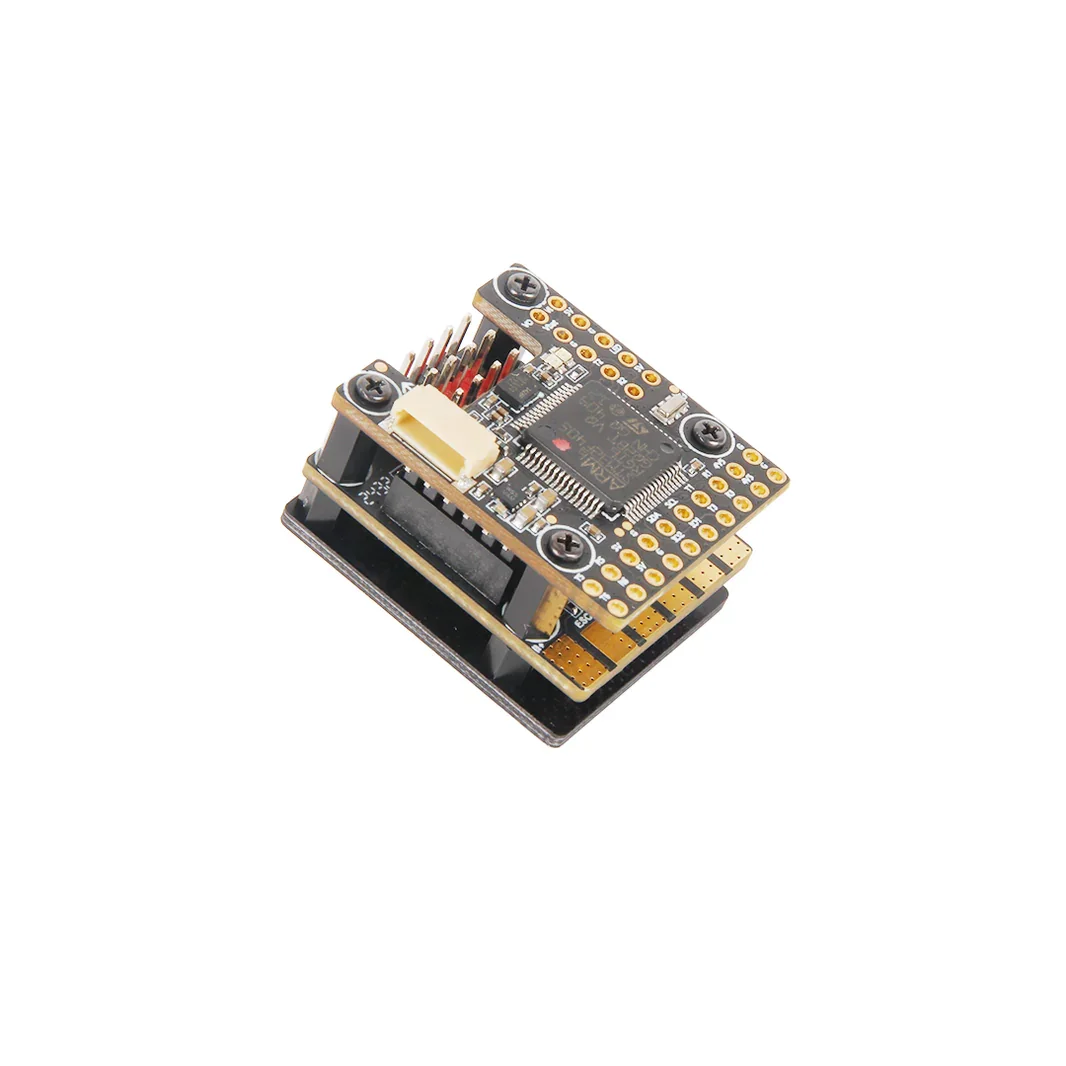
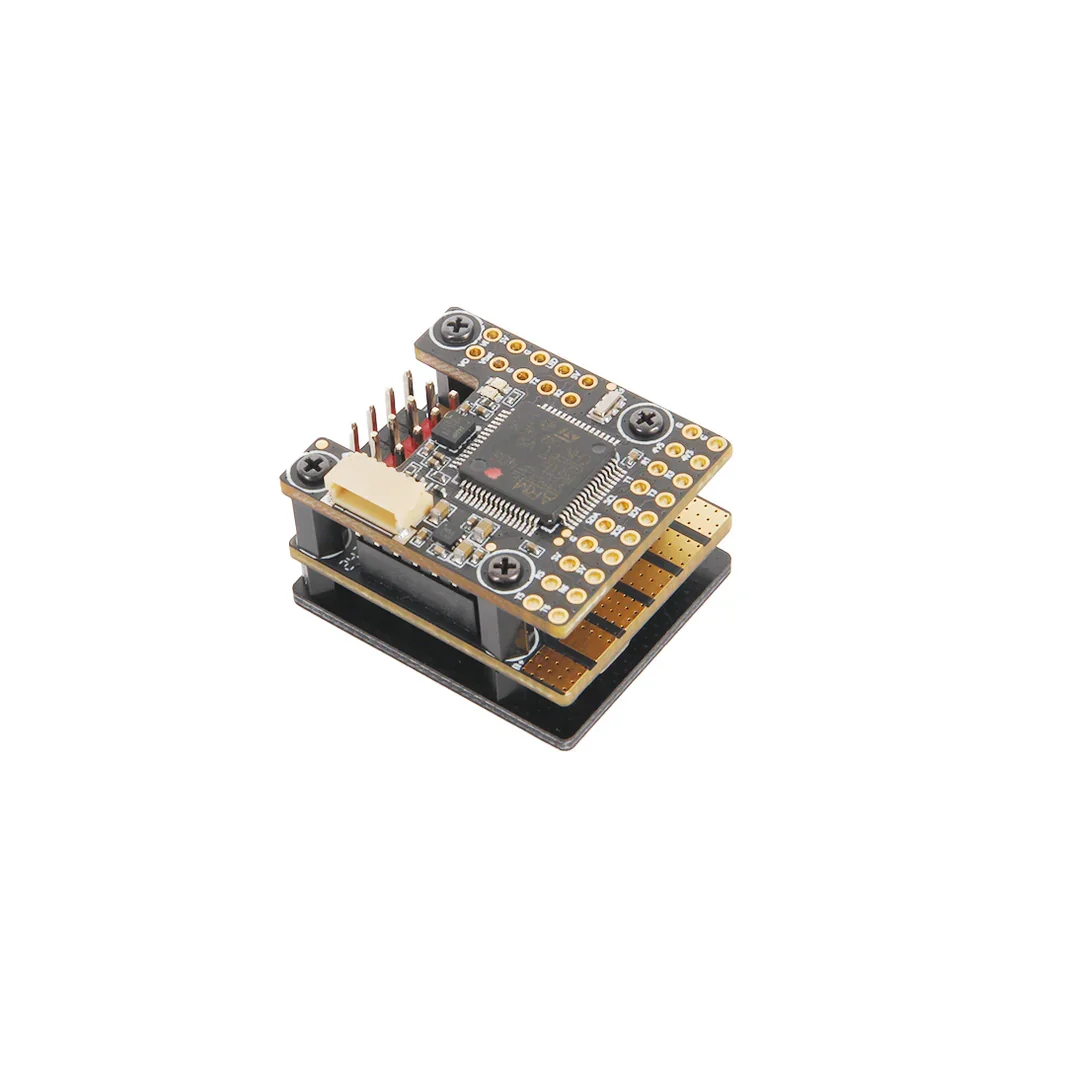
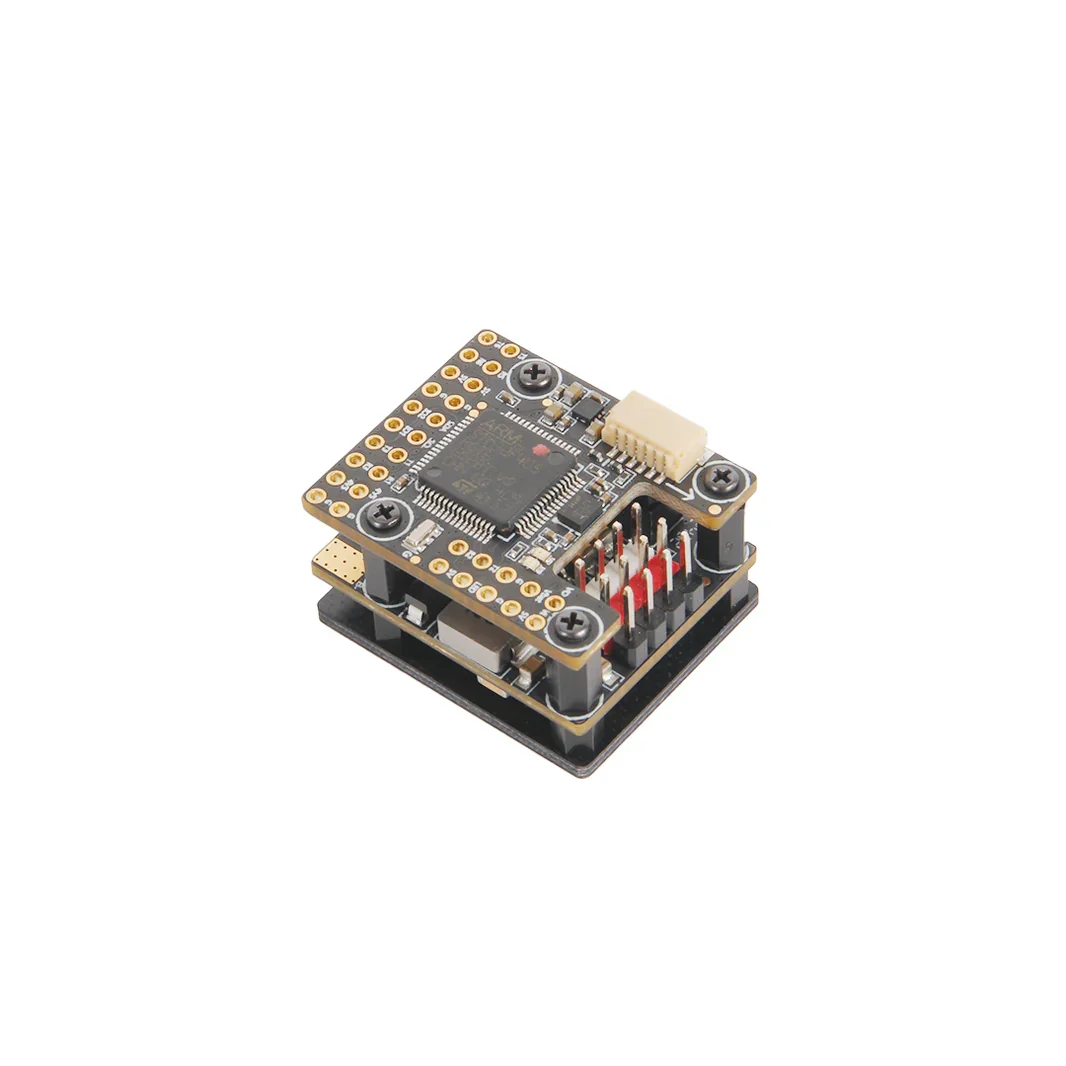
Kakute F405 Wing Mini — это компактный полетный контроллер, разработанный для самолетов и небольших БПЛА, оснащенный процессором STM32F405 и малошумящим инерциальным измерительным блоком ICM-42688-P с независимым стабилизатором напряжения для повышения стабильности. Он включает в себя два встроенных BEC для стабилизированного питания, интегрированный барометр, поддержку I2C и аналоговое экранное меню. Разработанный специально для небольших летательных аппаратов, этот полетный контроллер обеспечивает высокую производительность и точность в компактном корпусе, что делает его идеальным для условий ограниченного пространства.
Функции
-
Микроконтроллер STM32F405, работающий на частоте 168 МГц.
-
Высокоточный/малошумный инерциальный измерительный блок ICM-42688-P
-
2. Встроенный выход BEC: 5 В, 5 В/7,2 В.
-
Встроенный датчик напряжения и тока
-
Встроенный барометр SPL06
-
Поддержка порта I2C
-
Компактная и незаметная конструкция подходит для рамок компактного размера.
-
Поддерживает INAV (7.1.2 и более поздние версии), Ardupilot (4.5.6 и более поздние версии), Betaflight (4.5.2 и более поздние версии).
Технические характеристики
-
Микроконтроллер: STM32F405RGT6, 168 МГц, 192 КБ ОЗУ, 1 МБ флэш-памяти.
-
IMU: ICM-42688P (SPI1)
-
Питание от: SPL06 (I2C2)
-
OSD: AT7456E (SPI2)
-
Встроенный блок управления: 128 Мбит (SPI3)
-
5 портов UART (1, 2, 3, 5, 6), а R3 имеет встроенную инверсию.
-
7 выходов ШИМ, по умолчанию для светодиода NeoPixel используется PWM7.
-
2x АЦП (Bat1/Curr1)
-
1x I2C (I2C2 предназначен для внешних устройств, а также для встроенных датчиков)
-
2 светодиода для индикации состояния полетного контроллера (синие) и индикатора напряжения 3,3 В (зеленые).
-
USB/DFU-удлинитель для флешки с разъемом USB Type-C
-
Высокоточный датчик тока (110 А в непрерывном режиме, 132 А в пике)
-
Датчик напряжения батареи: 1K:10K (шкала 1100 в INAV, BATT_VOLT_MULT 11 в ArduPilot, шкала 110 в Betaflight)
-
Статическая мощность 110 мА при 5 В
Прошивка FC
-
ArduPilot: Kakute F405 Wing Mini (версии 4.5.2 и выше)
-
INAV: Kakute F405 Wing Mini (7.1.2 и более поздние версии)
-
Betaflight: Kakute F405 Wing Mini (версии 4.5.6 и выше)
Плата питания
-
Диапазон входного напряжения: 7,4~36 В (2~8S LiPo)
-
2 площадки питания ESC
-
Измеренный ток: 110 А в непрерывном режиме, 132 А в пиковом режиме. (Шкала 250 в INAV, 40 А/В в ArduPilot, шкала 250 в Betaflight)
Выход BEC 5 В
-
Предназначен для полетных контроллеров, приемников, экранного меню, камер, светодиодных лент 2812, GPS, телеметрии и т. д.
-
Выходное напряжение: 5,3 +/- 0,1 В постоянного тока.
-
Постоянный ток 3 А, пиковый ток 4,8 А.
BEC против выходного сигнала
-
Предназначен для сервоприводов
-
Регулируемое напряжение, по умолчанию 5,3 В, опция 7,2 В с контактной площадкой Jumper
-
Постоянный ток 3 А, пиковый ток 4,8 А.
Выход BEC 3,3 В
-
Линейный регулятор
-
Постоянный ток: 150 мА
Механический
-
Крепление: 20 x 20 мм, отверстие M2
-
Размеры: 25 x 30 x 20 мм
-
Вес: 17 г с платой расширения USB.
Пример схемы подключения

Ссылка на источник
-
Ardupilot WIKI :https://ardupilot.org/copter/docs/common-kakuteh7wing.html
-
Настройка Ardupilot: https://docs.holybro.com/autopilot/kakute-h743-wing/ardupilot-mapping
-
Картирование INAV: https://docs.holybro.com/autopilot/kakute-h743-wing/inav-mapping
В комплект входит
-
1x Мини-контроллер полета Kakute F405-Wing
-
1x плата питания
-
1x Нижняя доска
-
1 плата USB-EXT
-
1 модуль GPS (опционально)
-
1xЭлектролитический конденсатор: 2000 мкФ, 35 В.
-
3 комплекта2.54 Штифт Дюпон
-
1 кабель JST-SH6Pin длиной 15 см (для платы USB-EXT)