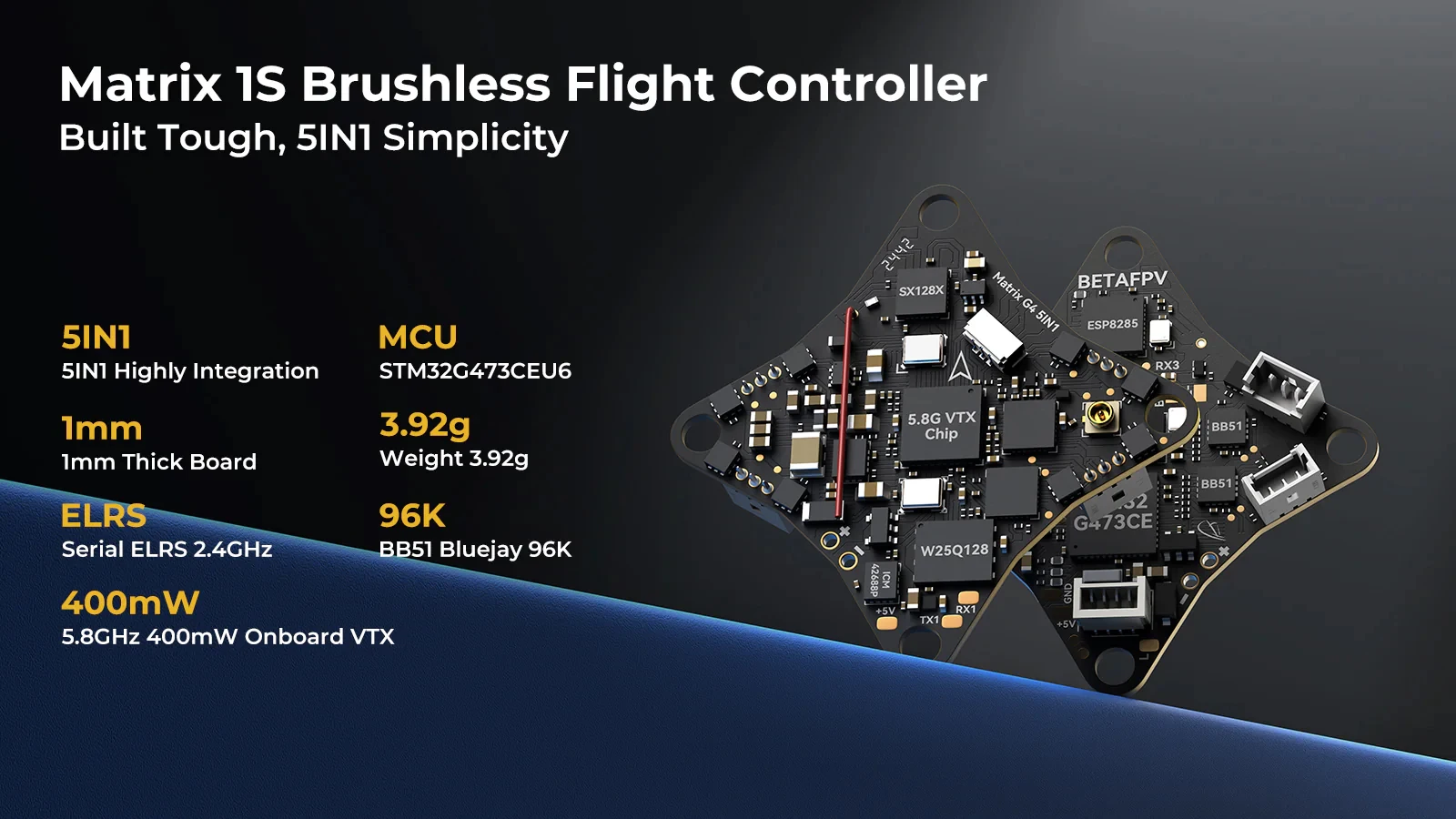
El controlador de vuelo sin escobillas Matrix 1S es una solución altamente integrada diseñada para principiantes y entusiastas del FPV. Su robusta placa de 1 mm de grosor garantiza durabilidad durante entrenamientos intensos, mientras que el conector de motor integrado simplifica la instalación, eliminando la necesidad de soldadura. Mejorado con el procesador G473, ofrece un aumento de rendimiento del 55 % con respecto al F411 para un control más preciso en carreras y vuelo acrobático. Además, su transmisor de video de 5,8 GHz y 400 mW de alta calidad garantiza una transmisión de video estable y de alta calidad.
Nota: estén atentos a nuestra próxima versión 3 en 1, diseñada específicamente para drones whoop 1S con VTX HD.
Atención
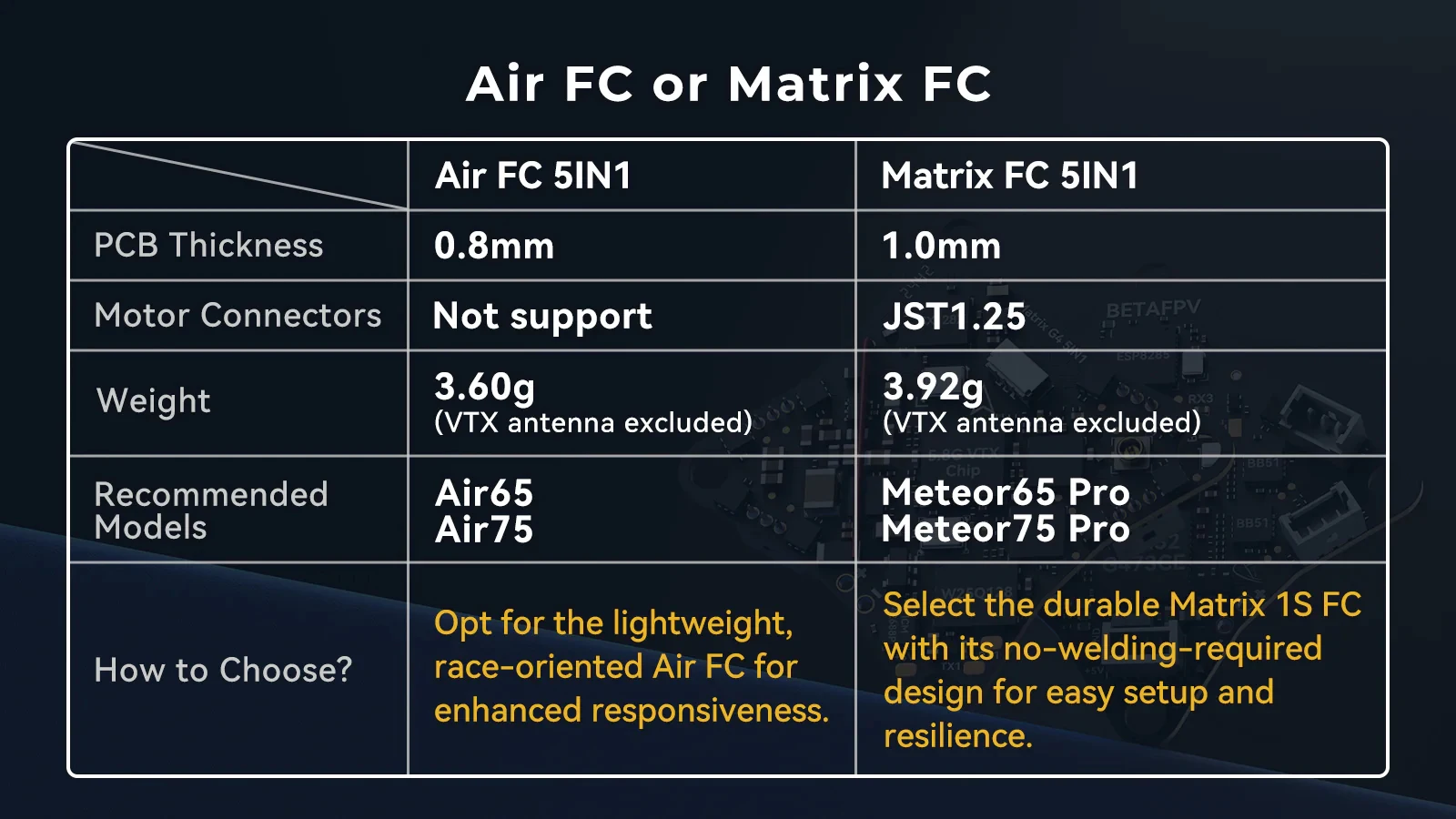
El controlador de vuelo sin escobillas Matrix 1S está diseñado para principiantes y pilotos ocasionales, ofreciendo mayor durabilidad gracias a su placa más gruesa y sin necesidad de soldadura, lo que lo hace perfecto para usuarios principiantes. Por ello, es ligeramente más pesado que la versión Air Brushless Flight Controller 5IN1. Para pilotos FPV avanzados que buscan una experiencia más reactiva y orientada a la competición, se recomienda encarecidamente la versión Air Brushless FC 5IN1. Tanto el Matrix 1S Brushless FC como la versión Air Brushless FC 5IN1 han superado rigurosas pruebas y cumplen con los estándares de competición.
• Los controladores de vuelo están cubiertos por la garantía contra defectos de fabricación. Los problemas derivados de errores del usuario, daños físicos por colisión, daños durante la instalación o el desmontaje, modificaciones, sobretensiones, incendios eléctricos o exposición al agua no están cubiertos.
• Potencia del VTX: Una mayor potencia del VTX consume más energía y genera más calor, lo que reduce el tiempo de vuelo. Para un mejor tiempo de vuelo en interiores, utilice una potencia de 25 a 100 mW.
Antena VTX: Conecte e instale la antena de transmisión de imagen antes de encender el control de vuelo. Como alternativa, ajuste la potencia de transmisión a 0 para evitar que se queme.
Puntos de viñeta
• Construcción robusta: El controlador de vuelo sin escobillas Matrix 1S cuenta con una placa de circuito impreso de 1 mm de grosor. Si bien es un poco más pesado, este diseño mejora la durabilidad para el entrenamiento diario. Para pilotos avanzados, la versión Air Brushless FC 5IN1 ofrece una alternativa más ligera.
• Instalación simplificada: El controlador de vuelo sin escobillas Matrix 1S es un verdadero controlador todo en uno con FC+VTX+OSD+ESC+RX integrados, además de conectores de motor estándar, lo que facilita enormemente la configuración y el mantenimiento. Ideal para principiantes en FPV, este diseño no requiere soldadura y garantiza una instalación sencilla.
·Rendimiento mejorado: Gracias al procesador G473, el controlador de vuelo sin escobillas Matrix 1S logra un notable aumento del 55 % en la velocidad de cálculo con respecto al F411, lo que proporciona una respuesta rápida para carreras precisas y maniobras de estilo libre complejas.
· Transmisión de vídeo de primera calidad: Equipado con un transmisor de vídeo (VTX) de 5,8 GHz de alta calidad que admite hasta 400 mW, el Matrix 1S garantiza una transmisión estable y precisa tanto para vuelos diarios como para carreras de competición.
Presupuesto
FC
-
Microcontrolador: STM32G473CEU6
-
Giroscopio: ICM42688P
-
Memoria de la caja negra: 16 MB
-
Sensor: Voltaje y corriente
-
BEC: 5V, Máx. 3A
-
UART: UART 1, UART 2 (para VTX), UART 3 (para RX), UART 4
-
OSD de BetaFlight: AT7456E
-
ESC: 5A continuo
-
RX: ELRS serie 2,4 GHz (V3.4.3)
-
VTX: 5,8 GHz, 48 canales, máx. 400 mW
-
Firmware del controlador de vuelo: Betaflight_4.5.0_BETAFPVG473
-
Puerto USB: SH1.0-4 pines
-
Conector del motor: JST1.25
-
Conector de batería: BT2.0
-
Tamaño del orificio de montaje: 26 mm x 26 mm
-
Peso: 3,92 ± 0,1 g
ESC
-
Entrada de alimentación: 1S solamente
-
Corriente: 5 A continuos, 8 A pico
-
Firmware del ESC: A_X_5_96KHz_V0.19.hex para el firmware BB51 Bluejay
-
Protocolo de señal Digital: DShot300, DShot600
VTX
-
Potencia de salida: 25/100/200/400/PIT
-
Frecuencia: 5,8 GHz, 48 canales, con Raceband: 5658~5917 MHz
-
Canal SEL: SmartAudio2.0
-
Tipo de modulación: FM
-
Control de frecuencia: PLL
-
Todos los armónicos: Máx. -50 dBm
-
Estabilidad de frecuencia: ±100 kHz (típica)
-
Precisión de frecuencia: ±200 kHz (típ.)
-
Error de portadora del canal: ±1,5 dB
-
Puerto de antena: 50
-
Temperatura de funcionamiento: -10~+80
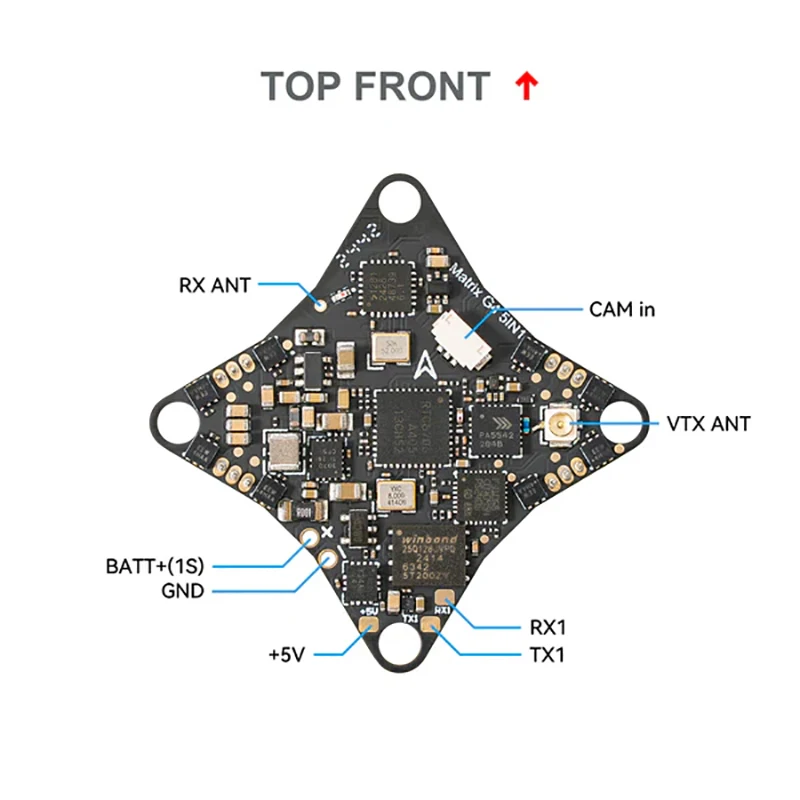
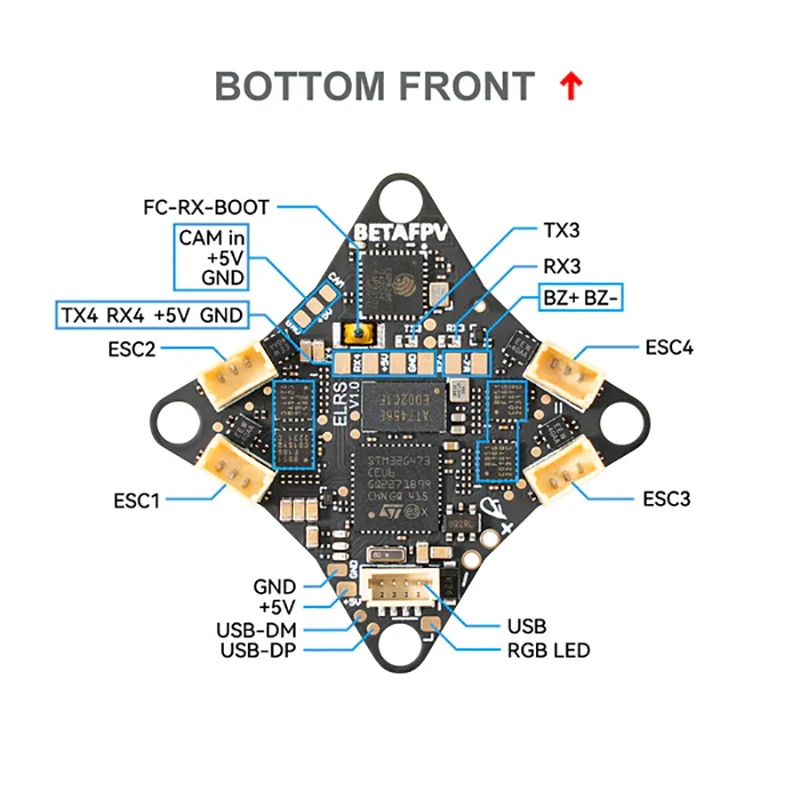
Diagrama
A continuación se muestra el diagrama del controlador de vuelo sin escobillas Matrix 1S.
|
Matriz 1S |
Agua 5 en 1 |
F4 1S 5A AIO |
|
|
MCU |
STM32G473CEU6 |
STM32F411CEU6 |
|
|
Frecuencia del MCU |
168 MHz |
108 MHz |
|
|
Giroscopio, frecuencia de muestreo máxima |
ICM42688P, 8 kHz |
BMI270, 3,2 kHz |
|
|
Memoria de caja negra |
16M |
8M |
|
|
OSD |
OSD de BetaFlight: AT7456E |
||
|
ESC |
1S, 5A |
||
|
RX |
ELRS serie integrado de 2,4 GHz |
||
|
VTX |
Integrado 5,8 GHz, 48 canales, 400 mW |
- |
|
|
Grosor de la placa de circuito impreso |
1,0 mm |
0,8 mm |
0,8 mm |
|
Enchufe del motor |
JST1.25 |
No lo apoyo |
JST1.25 |
|
Peso |
3,92 g (sin incluir la antena VTX) |
3,60 g (sin incluir la antena VTX) |
4,74 g (FC+M03 VTX, antena VTX excluida) |
El Meteor75 Pro ahora viene con el controlador de vuelo sin escobillas Matrix 1S mejorado.
A partir del 20 de noviembre, el Meteor75 Pro se actualizará con el controlador de vuelo sin escobillas Matrix 1S. Esta mejora incluye una placa resistente de 1 mm de grosor, un procesador G473 de alta velocidad con un 55 % más de potencia de cálculo y un transmisor de vídeo (VTX) integrado de 5,8 GHz y 400 mW. Los conectores de motor integrados simplifican la instalación, haciéndola más accesible para principiantes. Estas mejoras ofrecen mayor durabilidad y rendimiento, garantizando que el Meteor75 Pro destaque tanto en carreras FPV en interiores como en exteriores, así como en vuelo acrobático.
Recepción serial ELRS 2.4G
El receptor serial ELRS 2.4G utiliza el protocolo serial Crossfire (protocolo CRSF) para comunicarse con la placa controladora de vuelo. Por lo tanto, el receptor serial ELRS 2.4G admite la actualización a ELRS V3.0 sin necesidad de flashear el firmware de la controladora de vuelo Betaflight. Para acceder al estado de vinculación, encienda y apague el dispositivo tres veces.
-
Conecte y desconecte el controlador de vuelo tres veces;
-
Asegúrese de que el LED RX parpadee dos veces rápidamente, lo que indica que el receptor está en modo de enlace;
-
Asegúrese de que el módulo transmisor de RF o el transmisor de radio entren en estado de enlace, lo que envía un pulso de enlace;
-
Si el receptor tiene una luz fija, está conectado.
El receptor serie ELRS 2.4G se puede actualizar mediante Wi-Fi o Betaflight mediante la función de paso de firmware serie. A continuación, se explica cómo actualizar el firmware del receptor serie ELRS 2.4G mediante esta función.
-
Conecta tu controlador de vuelo a tu ordenador y conéctate a ExpressLRS Configurator en lugar de Betaflight Configurator;
-
Seleccione el destino "BETAFPV 2.4GHz AIO RX";
-
Flashear usando la BOpción etaflightPassthrough en el configurador de ExpressLRS.
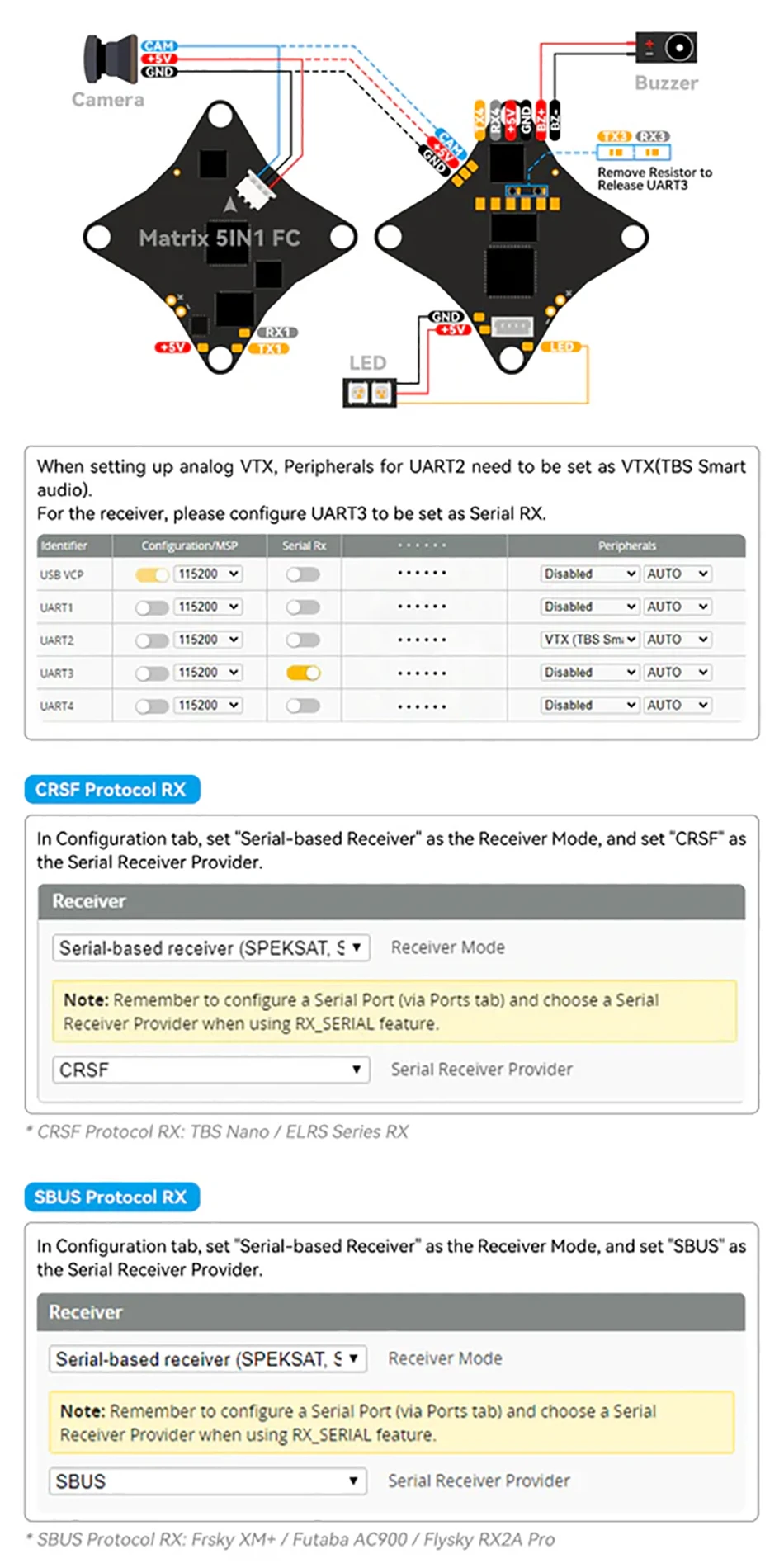
Cómo usar los puertos serie, el receptor integrado y el transmisor de vídeo.
Tenga en cuenta que, por defecto, UART2 está conectado al VTX y UART3 al RX. Para liberar UART3, retire la resistencia. Además, este controlador de vuelo reserva 2 puertos serie completos que pueden utilizarse para receptores CRSF/SBUS externos, GPS, VTX HD u otros dispositivos serie. Puede consultar las imágenes a continuación.
Piezas recomendadas
Drones: Meteor65 Pro, Meteor75 Pro
Marcos: Meteor65 Pro, Meteor75 Pro
Motores: 0702/0702SE, 0802/0802SE, 1102
Paquete
1 * Controlador de vuelo sin escobillas Matrix 1S
1 * Adaptador Tipo C a SH1.0
1 * Cable adaptador SH1.0-4 pines
4 tornillos autorroscantes M1.2*4
4 tornillos autorroscantes M1.4*4
4 * Bolas amortiguadoras