







Descripción del Producto
Con la creciente popularidad de la transmisión digital, FLYWOO presenta una solución innovadora para microdrones HD de 1-2S.
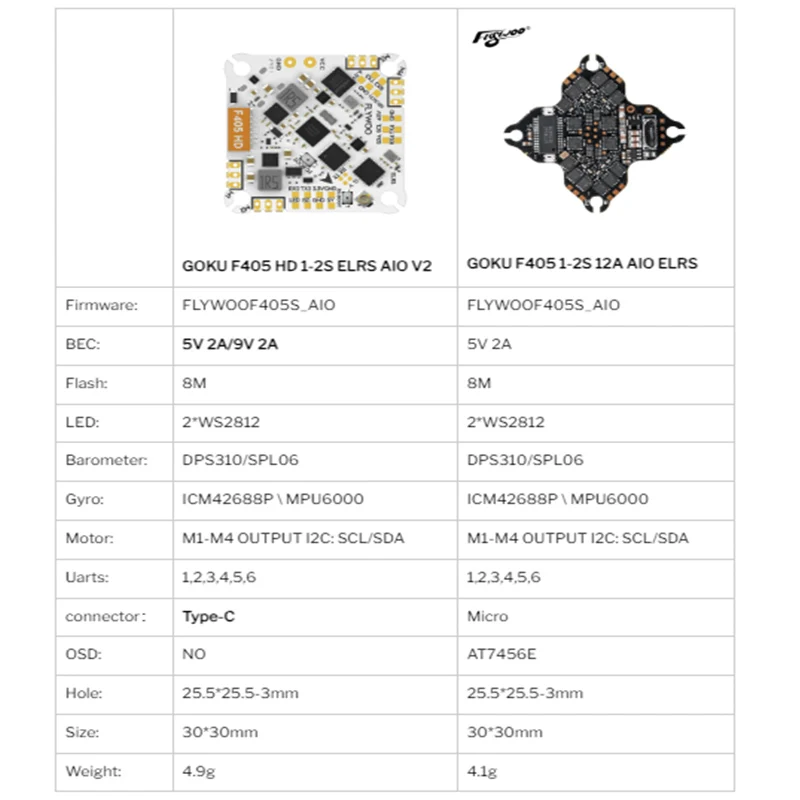
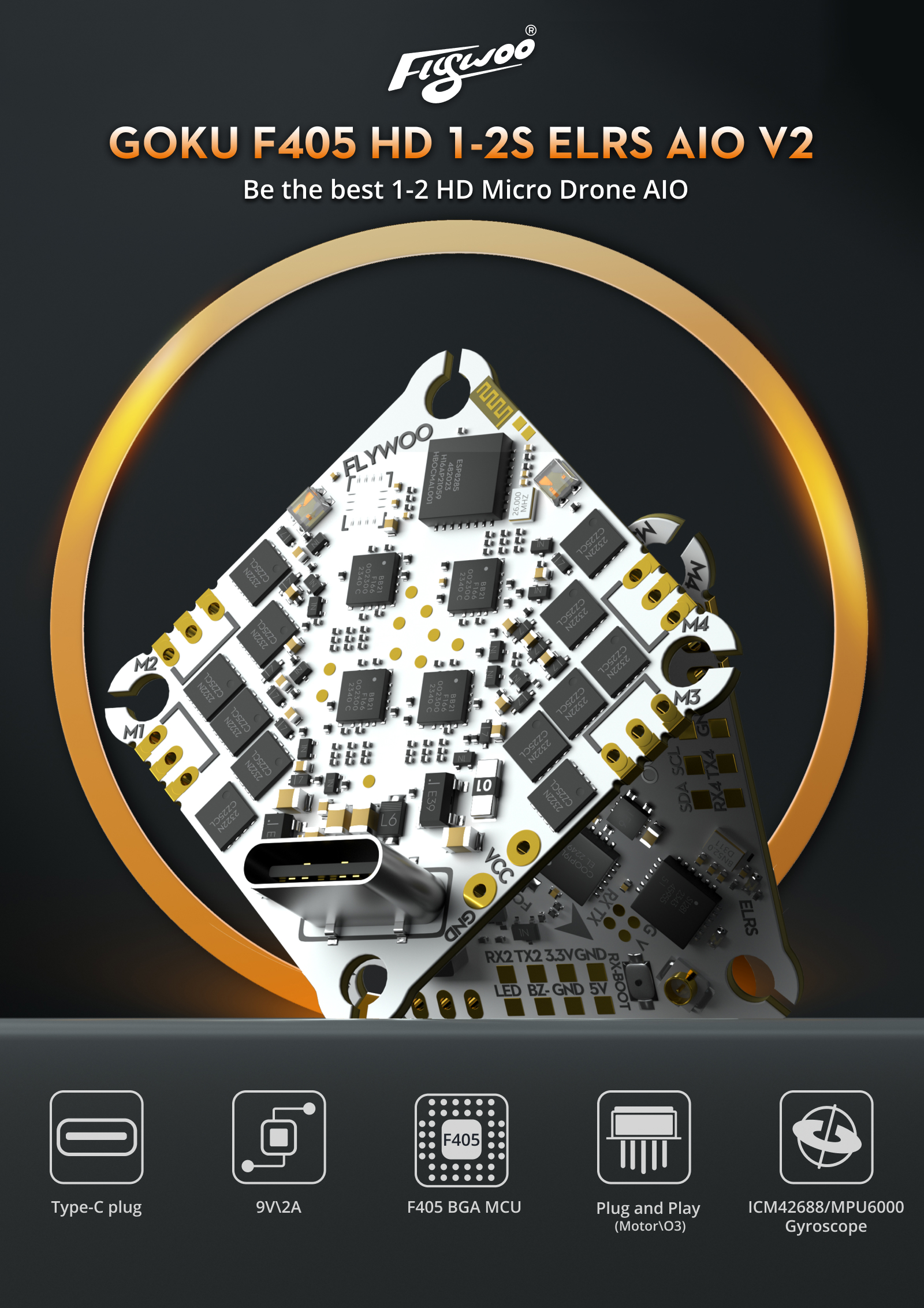
Esta completa solución HD AIO integra una interfaz Tipo-C, equipada con un microcontrolador BGA F405 de alto rendimiento, y ofrece suficientes puertos UART para satisfacer todas sus necesidades. El GOKU F405 HD V2 AIO incorpora un módulo BEC de 9 V y 2 A, lo que evita eficazmente los cortes de energía en la unidad O3 Air debido a una tensión insuficiente.
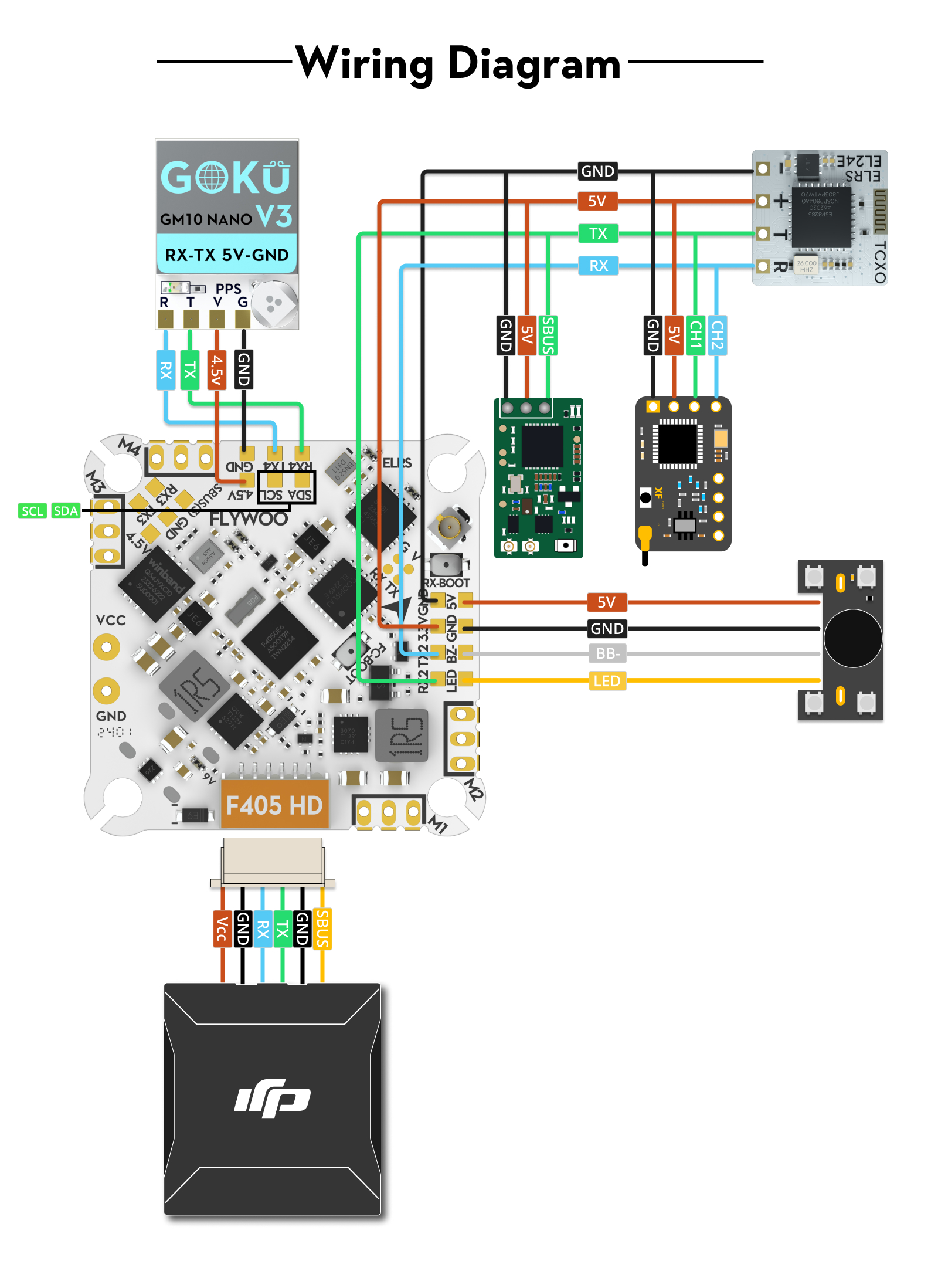
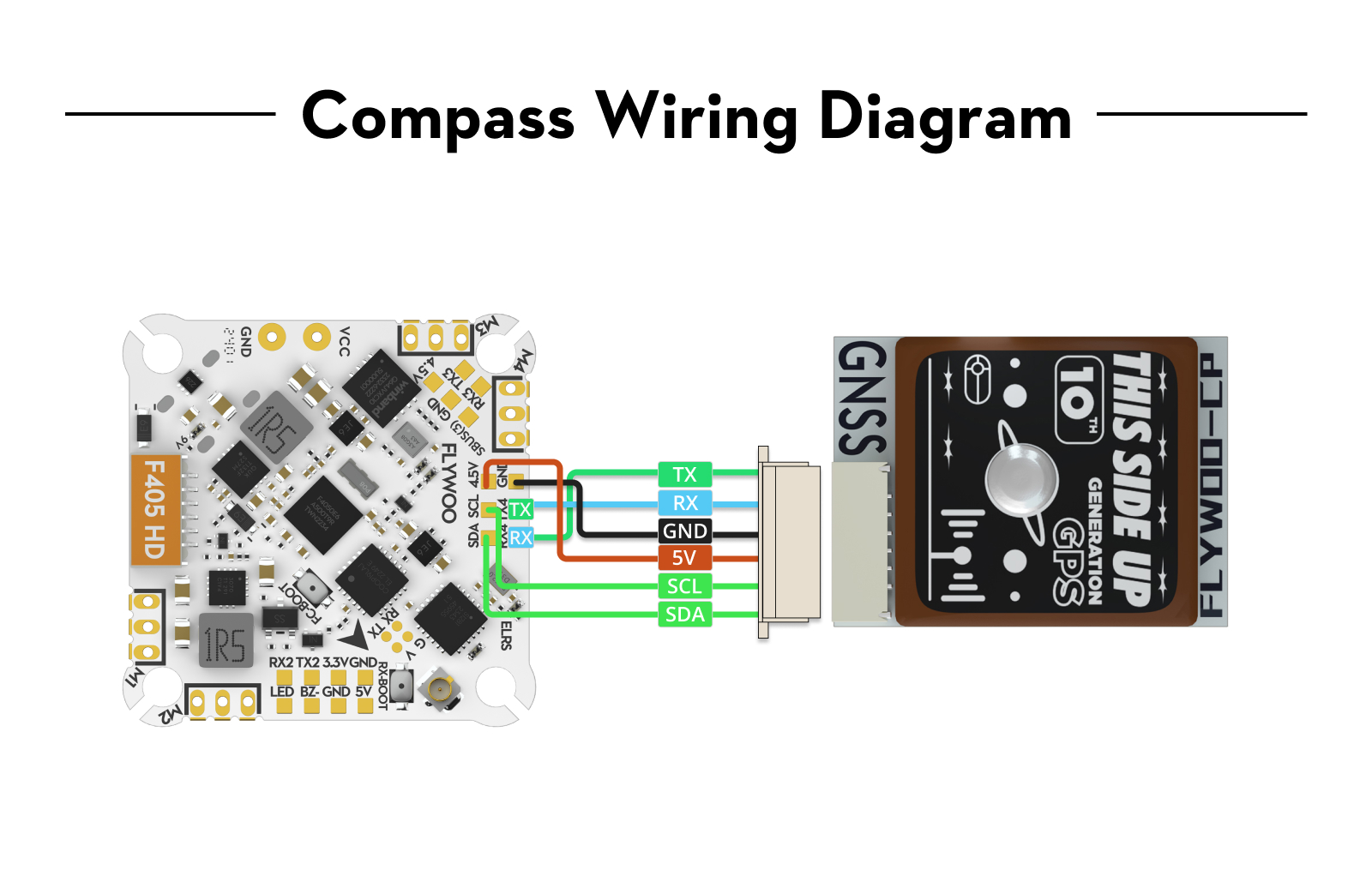
Además, incluye un receptor serial ELRS 2.4G, una caja negra de 8 MB, un barómetro y un sensor de corriente, diseñados específicamente para HD VTX. Sus conexiones de motor tipo zócalo y su diseño plug-and-play O3 simplifican considerablemente el proceso de instalación y depuración, logrando una combinación perfecta de eficiencia y comodidad.
Reflejos:
-
Diseño tipo C:Utiliza el puerto USB tipo C, que ofrece conexiones más cómodas y fiables.
-
Nueva fuente de alimentación:Incorpora un BEC de 9V 2A, que previene eficazmente los cortes de energía en la unidad O3 Air debido a caídas de voltaje.
-
Puerto O3 Plug-and-Play:El diseño de conexión directa para la unidad de aire O3 elimina los pasos de soldadura complejos.
-
Diseño del conector del motor:Incorpora conexiones tipo enchufe para los motores, lo que facilita las sustituciones y actualizaciones rápidas.
-
Diseño multifuncional:Integra un receptor serie ELRS de 2,4 GHz, una caja negra de 8 MB, un barómetro y un sensor de corriente. Dispone de 2 puertos UART completos y 1 puerto SBUS estándar, lo que permite la conexión con diversos dispositivos como GPS, VTX HD y receptores externos.
Presupuesto:
-
Firmware del controlador de vuelo BF:FLYWOOF405S_AIO
-
Firmware INAV: FLYWOOF405HD
-
Microcontrolador: STM32F405BGA
-
BEC: 5V 2A/9V 2A
-
Flash: 8M
-
LED: 2*WS2812
-
Barómetro: DPS310/SPL06
-
Giroscopio: ICM42688P \ MPU6000
-
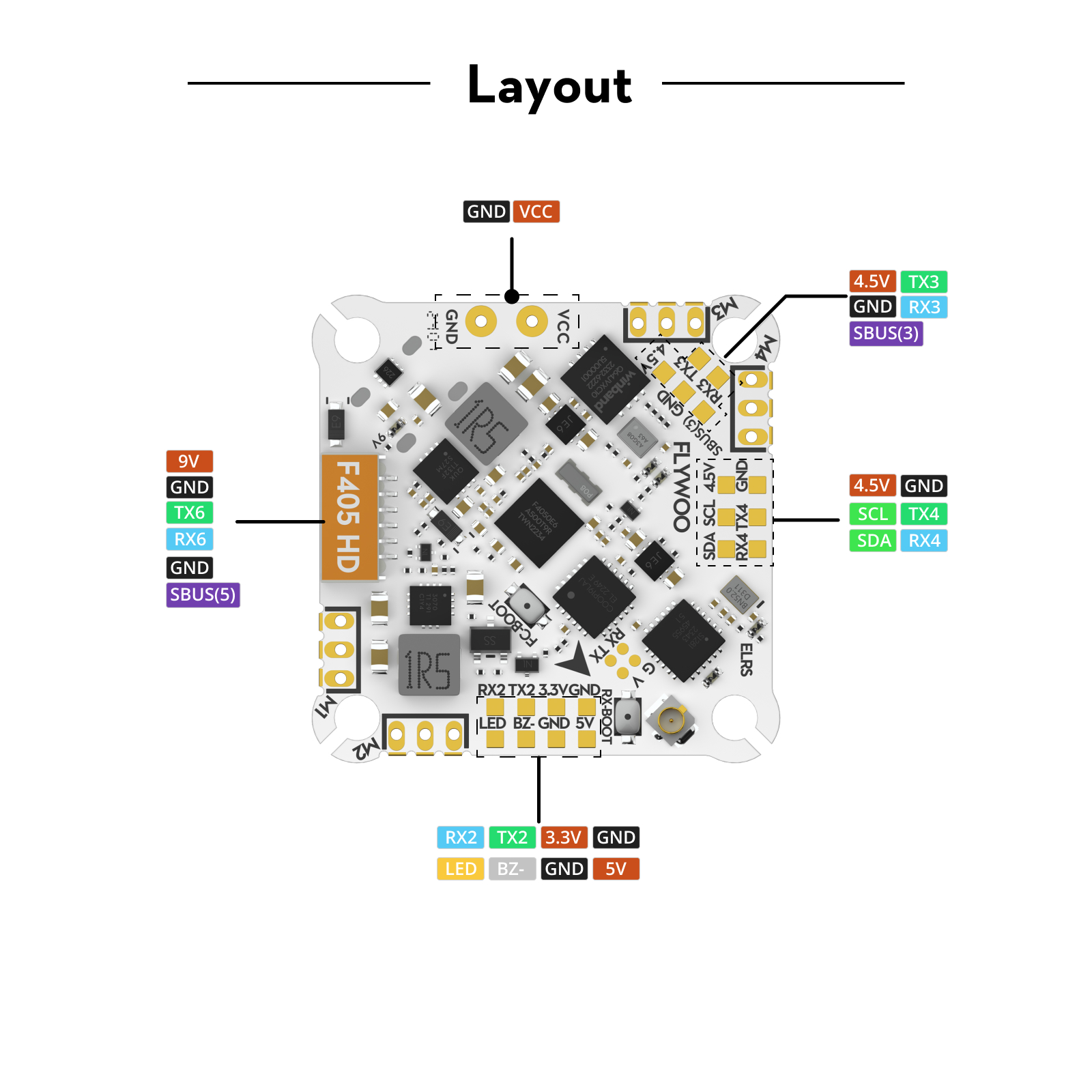
Motor: M1-M4 SALIDA I2C: SCL/SDA
-
UART: 1,2,3,4,5,6
-
Conector: Tipo C
-
OSD: NO
-
Agujero: 25,5*25,5-3 mm
-
Tamaño: 30*30 mm
-
Peso: 4,9 g
ESC 4 en 1 integrado
-
ESC BL_S 4 en 1 de 1S/2S y 12 A integrado
-
Soporte para Oneshot125, Oneshot42, Multishot,
-
Dshot150, Dshot300, Dshot600
-
Voltaje de entrada: 1-2S Lipo
-
Firmware: BLHELI_S
-
Firmware: Z_H_30_REV16.7
ELRS2.4G RX: (opcional)
-
Microcontrolador ESP8285
-
Módulo RF SX1280IMLTRT
-
Rango de frecuencia: 2400 MHz a 2500 MHz
-
Frecuencia de actualización máxima de recepción: 500 Hz
-
Frecuencia de actualización mínima del receptor: 25 Hz Seiral:
-
UART 1
-
Firmware: Flywoo EL24P 2400 RX
-
Versión: 3.X.X
En la caja
-
1 cable de alimentación XT30
-
1x Flywoo Antena T PCB Minimortal ELRS 2.4g UFL (solo versión ELRS)
-
1x Cable de conexión O3
-
1 cable de batería PH 2.0
-
1 condensador
-
4x Conector recto JST
-
4 tornillos M2*10
-
4 tuercas M2
-
4 bolas amortiguadoras M2

Acerca de Betaflight
Firmware ESC
-
El firmware del ESC viene configurado por defecto en Bluejay 0.19.2 48KHz.
-
Admite filtrado bidireccional D-shot y RPM en Betaflight.
-
No se recomienda actualizar a 96 kHz, ya que podría causar un error en la configuración de ralentí del motor, impidiendo que gire cuando está desactivado.
-
NO actualice el firmware con un intervalo más corto,De lo contrario, existe una cierta probabilidad de que el motor se detenga y se queme el controlador de vuelo.
Configurador ESC:https://preview.esc-configurator.com/
Recepción serial ELRS 2.4G
-
El receptor Serial ELRS 2.4G RX utiliza el protocolo serie Crossfire (protocolo CRSF) para comunicarse entre el receptor y la placa controladora de vuelo. Por lo tanto, el Serial ELRS 2.4G RX permite actualizar a ELRS Configurator sin necesidad de flashear el firmware de la controladora de vuelo Betaflight.
-
Pasos de unión
-
Para entrar en el modo de emparejamiento, desconecte y vuelva a conectar el cable de alimentación/datos tres veces;
-
El LED RX parpadeará rápidamente dos veces, lo que indica que el receptor está en modo de enlace;
-
Asegúrese de que el módulo TX o el transmisor inalámbrico entre en modo de enlace;
-
Si la luz del receptor permanece encendida constantemente, significa que está vinculado.
-
3. Pasos de actualización
-
-
El receptor serie ELRS 2.4G se puede actualizar mediante Wi-Fi o Betaflight mediante la función de paso de firmware serie. A continuación, se explica cómo actualizar el firmware del receptor serie ELRS 2.4G mediante esta función.
-
Inserta el controlador de vuelo en el ordenador, pero no lo conectes al configurador de Betaflight.
-
Seleccione el destino "FLYWOO 2.4Ghz EL24P"
-
Utilice la opción BetaflightPassthrough en el configurador de ExpressLRS para la actualización.
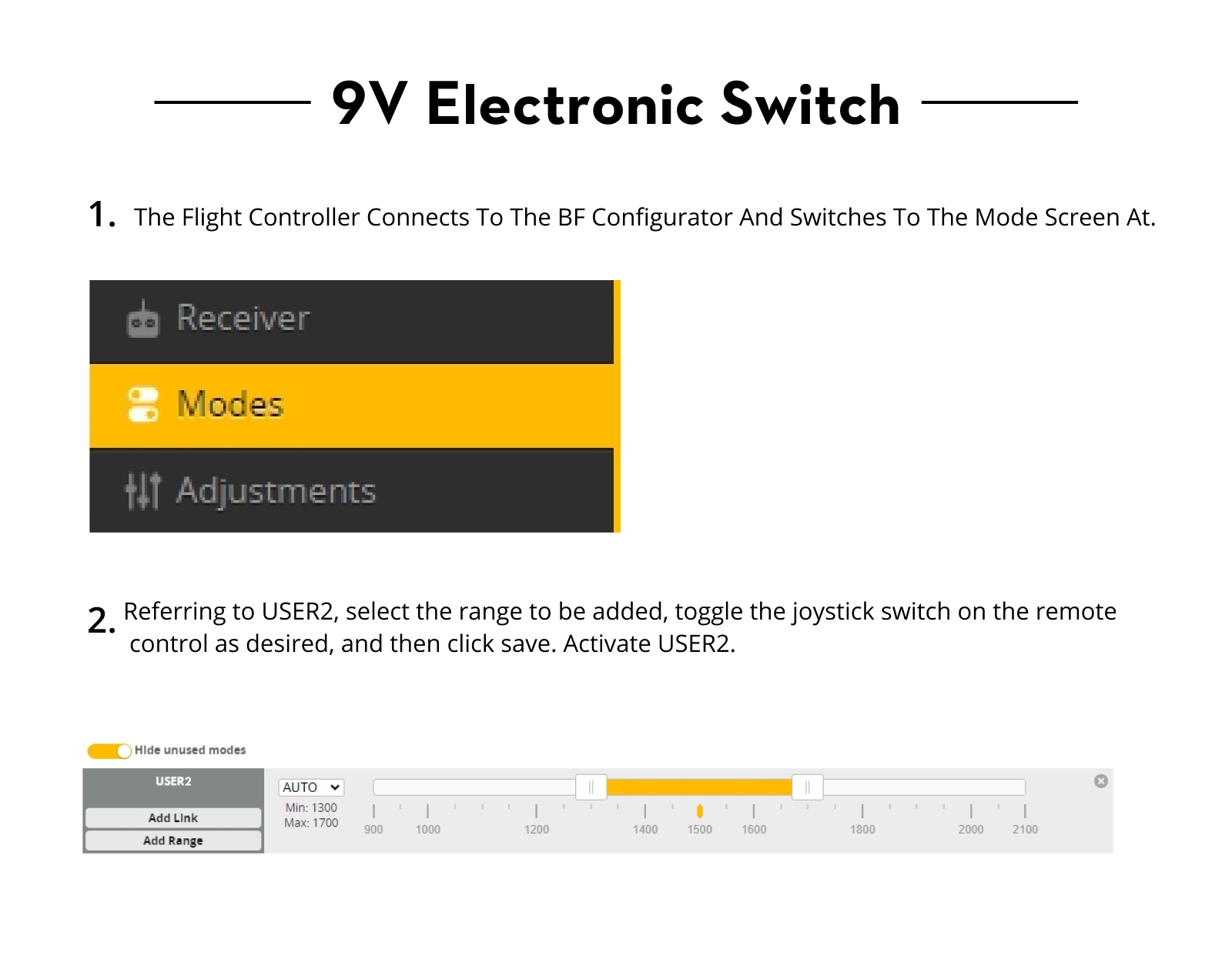
Interruptor electrónico de 9V:
Al controlar el interruptor USER1, es posible controlar toda la alimentación de 9 V al controlador de vuelo, interrumpiendo temporalmente la transmisión de imagen para evitar daños al equipo debido a temperaturas elevadas prolongadas.
Conecte el controlador de vuelo al configurador BF y cambie a la interfaz de Modos.
Desplácese hacia abajo para encontrar USER1, seleccione "Agregar rango" y luego mueva el interruptor del joystick en el control remoto que desea configurar. A continuación, guarde la configuración del motor. Active USER1.
