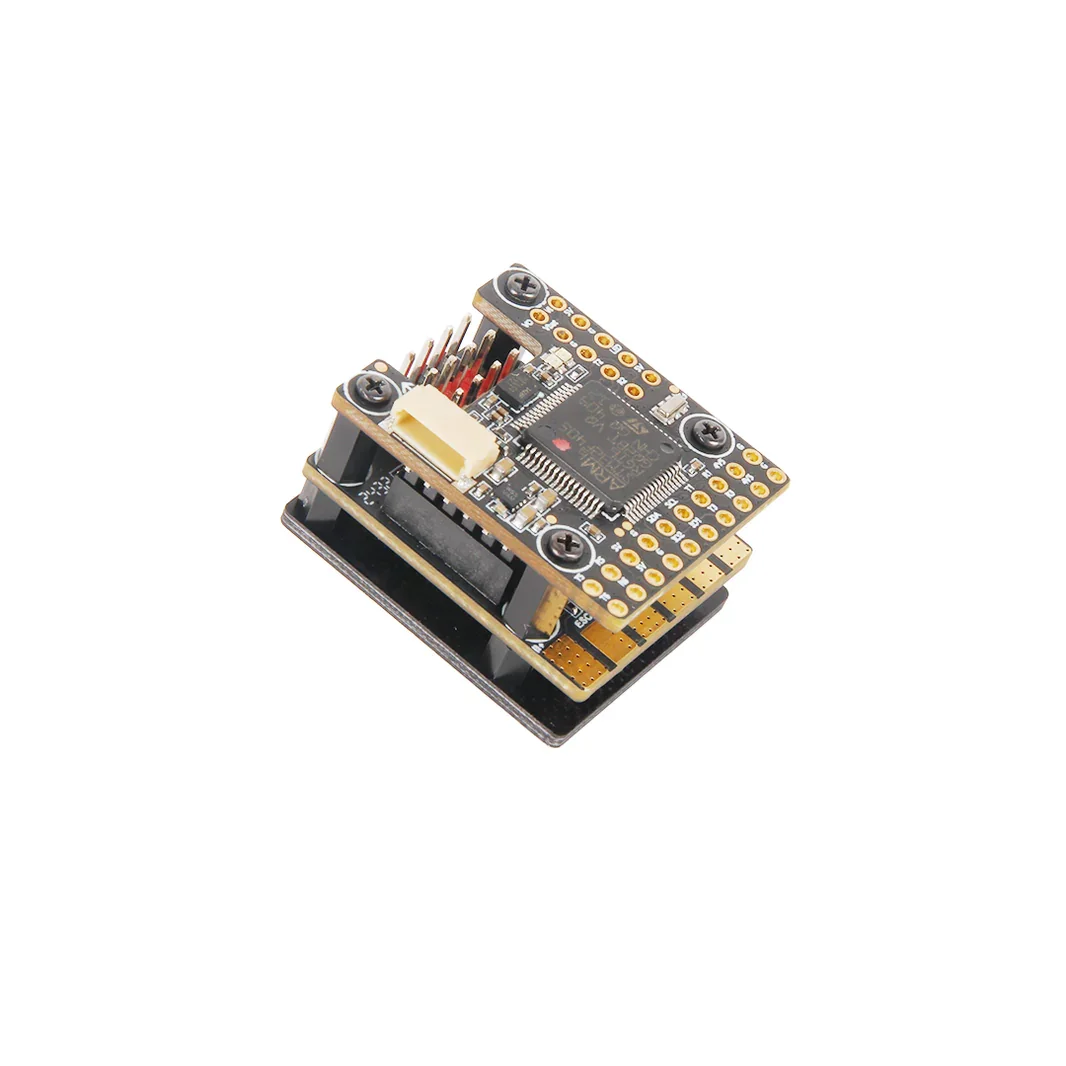
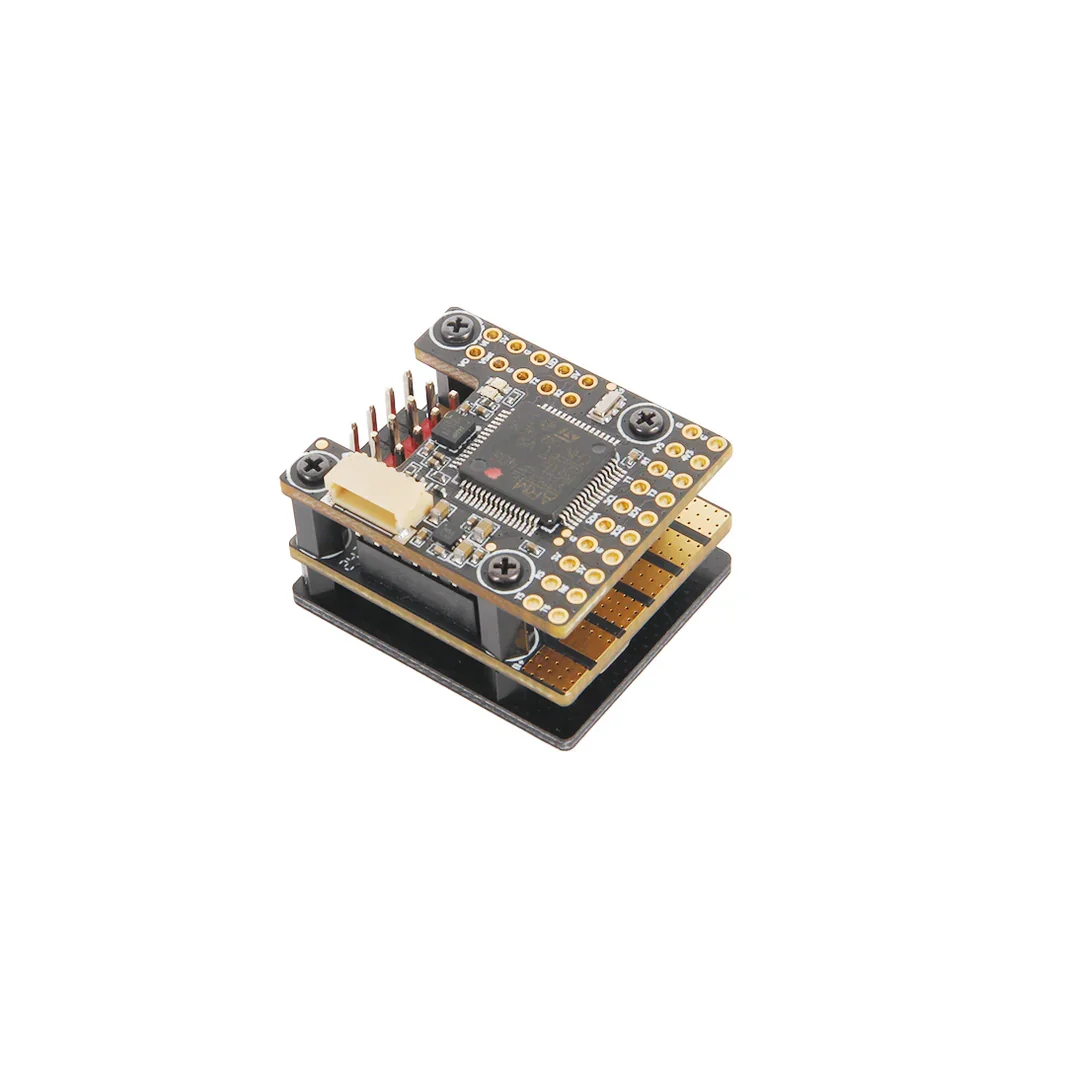
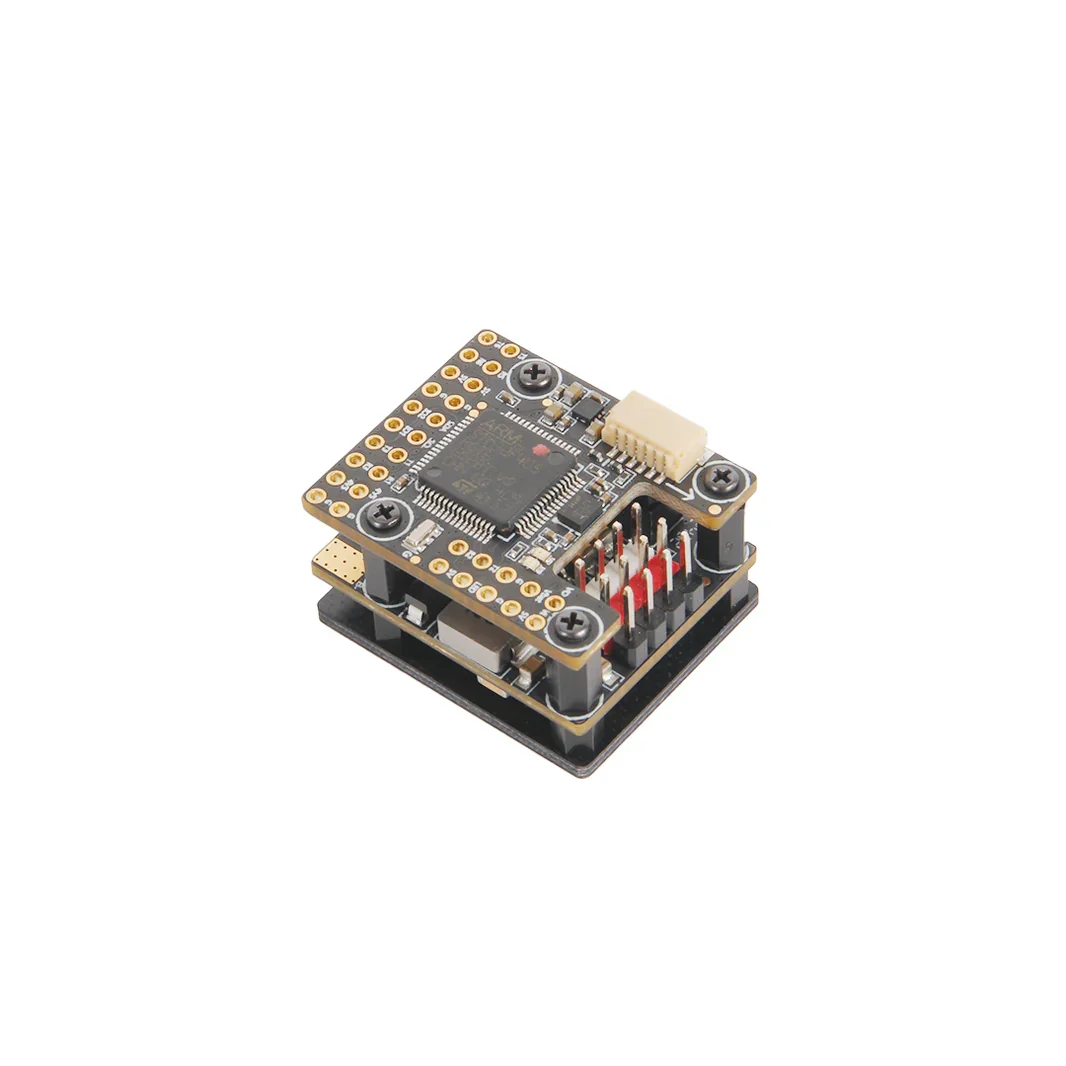
El Kakute F405 Wing Mini es un controlador de vuelo compacto diseñado para aeronaves de ala fija y pequeños UAV. Incorpora el procesador STM32F405 y la IMU ICM-42688-P de bajo ruido con LDO independiente para una mayor estabilidad. Incluye dos BEC integrados para alimentación regulada, un barómetro integrado, compatibilidad con I2C y OSD analógico. Diseñado para aeronaves pequeñas, este controlador de vuelo ofrece un rendimiento potente y una gran precisión en un formato compacto, lo que lo hace ideal para configuraciones con espacio limitado.
Características
-
Microcontrolador STM32F405 funcionando a 168 MHz.
-
IMU ICM-42688-P de alta precisión y bajo nivel de ruido
-
2 Salidas BEC integradas de 5V, 5V/7.2V
-
Sensor de voltaje y corriente integrado
-
Barómetro integrado SPL06
-
Compatibilidad con puerto I2C
-
Su diseño pequeño y discreto se adapta a marcos compactos.
-
Compatible con INAV (7.1.2 y posteriores), Ardupilot (4.5.6 y posteriores) y Betaflight (4.5.2 y posteriores).
Presupuesto
-
Microcontrolador: STM32F405RGT6, 168 MHz, 192 KB de RAM, 1 MB de memoria Flash.
-
IMU: ICM-42688P (SPI1)
-
Alimentado por: SPL06 (I2C2)
-
OSD: AT7456E (SPI2)
-
Caja negra integrada: 128 Mbit/s (SPI3)
-
5 puertos UART (1, 2, 3, 5, 6) y R3 con inversión integrada
-
Salida PWM de 7x, PWM7 se utiliza para el LED NeoPixel por defecto.
-
2x ADC (Bat1/Curr1)
-
1 puerto I2C (el puerto I2C2 es para dispositivos externos, también para sensores integrados).
-
2 LEDs para FC STATUS (azul) e indicador de 3,3 V (verde)
-
Extensor de llave USB/DFU con USB tipo C
-
Detección de corriente de alta precisión (110 A continuos, 132 A de pico)
-
Sensor de voltaje de la batería: 1K:10K (Escala 1100 en INAV, BATT_VOLT_MULT 11 en ArduPilot, Escala 110 en Betaflight)
-
Potencia estática 110 mA a 5 V
Firmware FC
-
ArduPilot: Kakute F405 Wing Mini (4.5.2 y posteriores)
-
INAV: Kakute F405 Wing Mini (7.1.2 y posteriores)
-
Betaflight: Kakute F405 Wing Mini (4.5.6 y posteriores)
Placa de alimentación
-
Rango de voltaje de entrada: 7,4~36 V (2~8S LiPo)
-
2 almohadillas de alimentación ESC
-
Corriente de detección: 110 A continua, 132 A de pico. (Escala 250 en INAV, 40 A/V en ArduPilot, escala 250 en Betaflight)
Salida BEC de 5V
-
Diseñado para FC, receptor, OSD, cámara, tira de LED 2812, GPS, telemetría, etc.
-
Salida 5,3 +/- 0,1 V CC
-
Corriente continua de 3 amperios, pico de 4,8 A
Salida BEC vs. salida
-
Diseñado para servos
-
Voltaje ajustable, 5,3 V por defecto, opción de 7,2 V con almohadilla Jumper
-
Corriente continua de 3 amperios, pico de 4,8 A
Salida BEC de 3,3 V
-
Regulador lineal
-
Corriente continua: 150 mA
Mecánico
-
Montaje: 20 x 20 mm, orificio M2
-
Dimensiones: 25 x 30 x 20 mm
-
Peso: 17 g con placa de extensión USB
Diagrama de cableado de muestra

Enlace de referencia
-
Ardupilot WIKI: https://ardupilot.org/copter/docs/common-kakuteh7wing.html
-
Mapeo de Ardupilot: https://docs.holybro.com/autopilot/kakute-h743-wing/ardupilot-mapping
-
Mapeo INAV: https://docs.holybro.com/autopilot/kakute-h743-wing/inav-mapping
El paquete incluye
-
1 controlador de vuelo mini Kakute F405-Wing
-
1x placa de alimentación
-
1x Tablero inferior
-
1 placa USB-EXT
-
1 módulo GPS (opcional)
-
1xCondensador electrolítico: 2000uF 35v
-
3 juegos2.54 Pin DuPont
-
1 cable JST-SH de 6 pines y 15 cm (para placa USB-EXT)